User Manual High Performance AC Drive
User Manual High Performance AC Drive
User Manual High Performance AC Drive
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
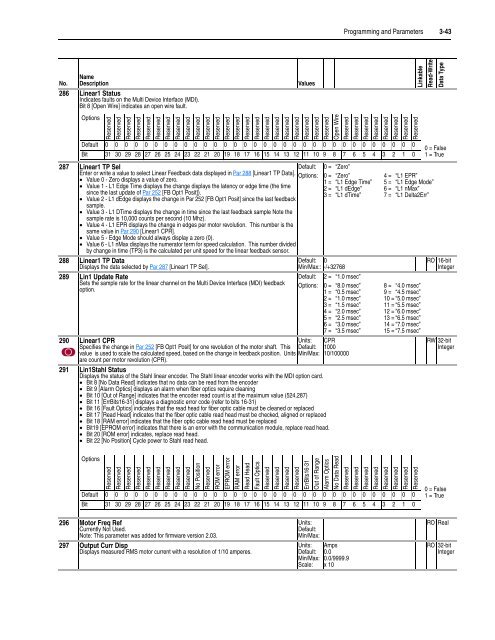
Programming and Parameters 3-43NameNo. Description286 Linear1 StatusIndicates faults on the Multi Device Interface (MDI).Bit 8 [Open Wire] indicates an open wire fault.Options287 Linear1 TP SelDefault:Enter or write a value to select Linear Feedback data displayed in Par 288 [Linear1 TP Data]. Options:• Value 0 - Zero displays a value of zero.• Value 1 - L1 Edge Time displays the change displays the latency or edge time (the timesince the last update of Par 252 [FB Opt1 Posit]).• Value 2 - L1 dEdge displays the change in Par 252 [FB Opt1 Posit] since the last feedbacksample.• Value 3 - L1 DTime displays the change in time since the last feedback sample Note thesample rate is 10,000 counts per second (10 Mhz).• Value 4 - L1 EPR displays the change in edges per motor revolution. This number is thesame value in Par 290 [Linear1 CPR].• Value 5 - Edge Mode should always display a zero (0).• Value 6 - L1 nMax displays the numerator term for speed calculation. This number dividedby change in time (TP3) is the calculated per unit speed for the linear feedback sensor.288 Linear1 TP DataDisplays the data selected by Par 287 [Linear1 TP Sel].289 Lin1 Update RateSets the sample rate for the linear channel on the Multi Device Interface (MDI) feedbackoption.ValuesReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedReservedOpen WireReservedReservedReservedReservedReservedReservedReservedReservedDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 00 =0 =1 =2 =3 =Default: 0Min/Max:: -/+32768Default:Options:290 Linear1 CPRUnits:Specifies the change in Par 252 [FB Opt1 Posit] for one revolution of the motor shaft. This Default:value is used to scale the calculated speed, based on the change in feedback position. Units Min/Max:are count per motor revolution (CPR).291 Lin1Stahl StatusDisplays the status of the Stahl linear encoder. The Stahl linear encoder works with the MDI option card.• Bit 8 [No Data Read] indicates that no data can be read from the encoder• Bit 9 [Alarm Optics] displays an alarm when fiber optics require cleaning• Bit 10 [Out of Range] indicates that the encoder read count is at the maximum value (524,287)• Bit 11 [ErrBits16-31] displays a diagnostic error code (refer to bits 16-31)• Bit 16 [Fault Optics] indicates that the read head for fiber optic cable must be cleaned or replaced• Bit 17 [Read Head] indicates that the fiber optic cable read head must be checked, aligned or replaced• Bit 18 [RAM error] indicates that the fiber optic cable read head must be replaced• Bit19 [EPROM error] indicates that there is an error with the communication module, replace read head.• Bit 20 [ROM error] indicates, replace read head.• Bit 22 [No Position] Cycle power to Stahl read head.Options2 =0 =1 =2 =3 =4 =5 =6 =7 =“Zero”“Zero”4 = “L1 EPR”“L1 Edge Time” 5 = “L1 Edge Mode”“L1 dEdge” 6 = “L1 nMax”“L1 dTime” 7 = “L1 Delta2Err”“1.0 msec”“8.0 msec” 8 = “4.0 msec”“0.5 msec” 9 = “4.5 msec”“1.0 msec” 10 = “5.0 msec”“1.5 msec” 11 = “5.5 msec”“2.0 msec” 12 = ”6.0 msec”“2.5 msec” 13 = “6.5 msec”“3.0 msec” 14 = “7.0 msec”“3.5 msec” 15 = “7.5 msec”CPR100010/100000ReservedReservedReservedReservedReservedReservedReservedReservedReservedNo PositionReservedROM errorEPROM errorRAM errorRead HeadFault OpticsReservedReservedReservedReservedErrBits16-31Out of RangeAlarm OpticsNo Data ReadReservedReservedReservedReservedReservedReservedReservedReservedDefault 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Bit 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0LinkableRead-WriteData Type0 = False1 = TrueRO 16-bitIntegerRW 32-bitInteger0 = False1 = True296 Motor Freq RefCurrently Not Used.Note: This parameter was added for firmware version 2.03.297 Output Curr DispDisplays measured RMS motor current with a resolution of 1/10 amperes.Units:Default:Min/Max:Units:Default:Min/Max:Scale:Amps0.00.0/9999.9x 10RO RealRO 32-bitInteger