


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
DISEÑO Y CONSTRUCCIÓN DE VEHÍCULOS AÉREOS NO TRIPULADOS BASADOS EN TECNOLOGÍAS LIBRES PARA FINES DIDÁCTICOS Y DE INVESTIGACIÓN<br />
Figura 12. Conexión del módulo bluetooth a Arduino<br />
Figura 9. Conexión de Arduino al ESC y al motor<br />
Figura 10. Inversión de giro del motor<br />
Una sola batería puede alimentar los cuatro motores y a<br />
Arduino. Se propone el uso de una batería de 11.1V a<br />
10000mAh.<br />
Las conexiones entre el IMU (MPU6050) y Arduino son de<br />
la manera ilustrada abajo. La conexión es mediante I2C,<br />
empleando los pines A4 y A5. (Figura 11)<br />
La programación del modo de control elegido se hará en<br />
Arduino, apoyado con el IMU para el cálculo de los ángulos,<br />
enviando valores PWM a los motores para controlar sus<br />
velocidades en proporción a sus inestabilidades medidas<br />
mediante su posición angular. Hay que considerar la<br />
frecuencia de la señal PWM, es decir, los tiempos en alto y<br />
bajo del pulso. La rapidez de corrección de los errores<br />
dependerá del modo de control elegido.<br />
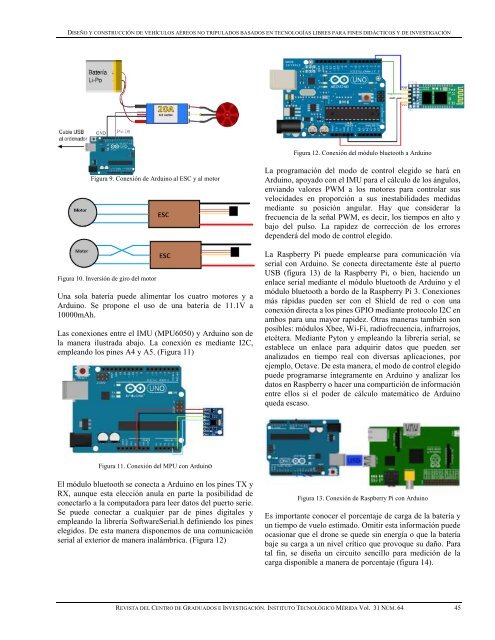
La Raspberry Pi puede emplearse para comunicación vía<br />
serial con Arduino. Se conecta directamente éste al puerto<br />
USB (figura 13) de la Raspberry Pi, o bien, haciendo un<br />
enlace serial mediante el módulo bluetooth de Arduino y el<br />
módulo bluetooth a bordo de la Raspberry Pi 3. Conexiones<br />
más rápidas pueden ser con el Shield de red o con una<br />
conexión directa a los pines GPIO mediante protocolo I2C en<br />
ambos para una mayor rapidez. Otras maneras también son<br />
posibles: módulos Xbee, Wi-Fi, radiofrecuencia, infrarrojos,<br />
etcétera. Mediante Pyton y empleando la librería serial, se<br />
establece un enlace para adquirir datos que pueden ser<br />
analizados en tiempo real con diversas aplicaciones, por<br />
ejemplo, Octave. De esta manera, el modo de control elegido<br />
puede programarse íntegramente en Arduino y analizar los<br />
datos en Raspberry o hacer una compartición de información<br />
entre ellos si el poder de cálculo matemático de Arduino<br />
queda escaso.<br />
Figura 11. Conexión del MPU con Arduino<br />
El módulo bluetooth se conecta a Arduino en los pines TX y<br />
RX, aunque esta elección anula en parte la posibilidad de<br />
conectarlo a la computadora para leer datos del puerto serie.<br />
Se puede conectar a cualquier par de pines digitales y<br />
empleando la librería SoftwareSerial.h definiendo los pines<br />
elegidos. De esta manera disponemos de una comunicación<br />
serial al exterior de manera inalámbrica. (Figura 12)<br />
Figura 13. Conexión de Raspberry Pi con Arduino<br />
Es importante conocer el porcentaje de carga de la batería y<br />
un tiempo de vuelo estimado. Omitir esta información puede<br />
ocasionar que el drone se quede sin energía o que la batería<br />
baje su carga a un nivel crítico que provoque su daño. Para<br />
tal fin, se diseña un circuito sencillo para medición de la<br />
carga disponible a manera de porcentaje (figura 14).<br />
REVISTA DEL CENTRO DE GRADUADOS E INVESTIGACIÓN. INSTITUTO TECNOLÓGICO MÉRIDA Vol. <strong>31</strong> NÚM. <strong>64</strong> 45














