


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
BASTO UC, O.E., SANDOVAL GÍO, J., FLORES NOVELO, A.A. Y HERNÁNDEZ BENÍTEZ, J.A.<br />
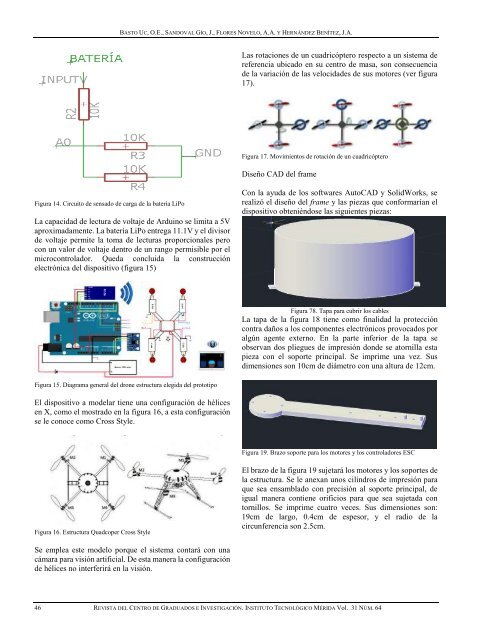
Las rotaciones de un cuadricóptero respecto a un sistema de<br />
referencia ubicado en su centro de masa, son consecuencia<br />
de la variación de las velocidades de sus motores (ver figura<br />
17).<br />
Figura 17. Movimientos de rotación de un cuadricóptero<br />
Diseño CAD del frame<br />
Figura 14. Circuito de sensado de carga de la batería LiPo<br />
La capacidad de lectura de voltaje de Arduino se limita a 5V<br />
aproximadamente. La batería LiPo entrega 11.1V y el divisor<br />
de voltaje permite la toma de lecturas proporcionales pero<br />
con un valor de voltaje dentro de un rango permisible por el<br />
microcontrolador. Queda concluida la construcción<br />
electrónica del dispositivo (figura 15)<br />
Con la ayuda de los softwares AutoCAD y SolidWorks, se<br />
realizó el diseño del frame y las piezas que conformarían el<br />
dispositivo obteniéndose las siguientes piezas:<br />
Figura 78. Tapa para cubrir los cables<br />
La tapa de la figura 18 tiene como finalidad la protección<br />
contra daños a los componentes electrónicos provocados por<br />
algún agente externo. En la parte inferior de la tapa se<br />
observan dos pliegues de impresión donde se atornilla esta<br />
pieza con el soporte principal. Se imprime una vez. Sus<br />
dimensiones son 10cm de diámetro con una altura de 12cm.<br />
Figura 15. Diagrama general del drone estructura elegida del prototipo<br />
El dispositivo a modelar tiene una configuración de hélices<br />
en X, como el mostrado en la figura 16, a esta configuración<br />
se le conoce como Cross Style.<br />
Figura 19. Brazo soporte para los motores y los controladores ESC<br />
Figura 16. Estructura Quadcoper Cross Style<br />
El brazo de la figura 19 sujetará los motores y los soportes de<br />
la estructura. Se le anexan unos cilindros de impresión para<br />
que sea ensamblado con precisión al soporte principal, de<br />
igual manera contiene orificios para que sea sujetada con<br />
tornillos. Se imprime cuatro veces. Sus dimensiones son:<br />
19cm de largo, 0.4cm de espesor, y el radio de la<br />
circunferencia son 2.5cm.<br />
Se emplea este modelo porque el sistema contará con una<br />
cámara para visión artificial. De esta manera la configuración<br />
de hélices no interferirá en la visión.<br />
46 REVISTA DEL CENTRO DE GRADUADOS E INVESTIGACIÓN. INSTITUTO TECNOLÓGICO MÉRIDA Vol. <strong>31</strong> NÚM. <strong>64</strong>














