- Seite 1 und 2:
In situ Neutronen-Reflektometrie un
- Seite 3:
Für Jeanette, Michael und Benjamin
- Seite 6 und 7:
Inhaltsverzeichnis 5.2. Identifizie
- Seite 8 und 9:
Inhaltsverzeichnis C. Wachstum von
- Seite 10 und 11:
1. Einleitung Mittlerweile wird bei
- Seite 12 und 13:
1. Einleitung lässt sich die kompl
- Seite 14 und 15:
1. Einleitung Diese Depositionsmeth
- Seite 17 und 18:
2. Dünnfilmtechnologie Das zentral
- Seite 19 und 20:
2.1. Depositionstechniken zur Herst
- Seite 21 und 22:
2.2. Wachstum dünner Filme E B S N
- Seite 23 und 24:
2.2. Wachstum dünner Filme Erstere
- Seite 25 und 26:
2.2. Wachstum dünner Filme ner Lee
- Seite 27 und 28:
2.2. Wachstum dünner Filme dung de
- Seite 29 und 30:
2.3. Charakterisierung dünner Film
- Seite 31 und 32:
2.3. Charakterisierung dünner Film
- Seite 33 und 34: 2.3. Charakterisierung dünner Film
- Seite 35 und 36: 2.3. Charakterisierung dünner Film
- Seite 37 und 38: 2.3. Charakterisierung dünner Film
- Seite 39 und 40: 2.3. Charakterisierung dünner Film
- Seite 41: Teil II. In situ Neutronen-Reflekto
- Seite 44 und 45: 3. Untersuchung magnetischer Eigens
- Seite 46 und 47: 3. Untersuchung magnetischer Eigens
- Seite 48 und 49: 3. Untersuchung magnetischer Eigens
- Seite 50 und 51: 3. Untersuchung magnetischer Eigens
- Seite 52 und 53: 3. Untersuchung magnetischer Eigens
- Seite 54 und 55: 3. Untersuchung magnetischer Eigens
- Seite 56 und 57: 3. Untersuchung magnetischer Eigens
- Seite 58 und 59: 4. Sputtersystem zur in situ Neutro
- Seite 60 und 61: 4. Sputtersystem zur in situ Neutro
- Seite 62 und 63: 4. Sputtersystem zur in situ Neutro
- Seite 64 und 65: 4. Sputtersystem zur in situ Neutro
- Seite 66 und 67: 4. Sputtersystem zur in situ Neutro
- Seite 68 und 69: 4. Sputtersystem zur in situ Neutro
- Seite 70 und 71: 5. Inbetriebnahme und Verbesserung
- Seite 72 und 73: 5. Inbetriebnahme und Verbesserung
- Seite 74 und 75: 5. Inbetriebnahme und Verbesserung
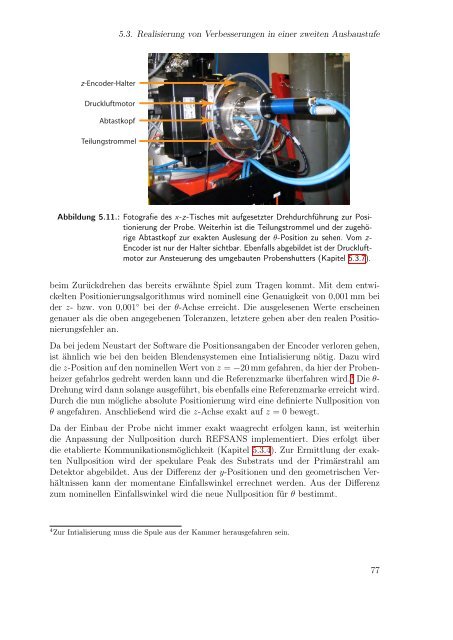
- Seite 76 und 77: 5. Inbetriebnahme und Verbesserung
- Seite 78 und 79: 5. Inbetriebnahme und Verbesserung
- Seite 80 und 81: 5. Inbetriebnahme und Verbesserung
- Seite 82 und 83: 5. Inbetriebnahme und Verbesserung
- Seite 86 und 87: 5. Inbetriebnahme und Verbesserung
- Seite 88 und 89: 5. Inbetriebnahme und Verbesserung
- Seite 90 und 91: 5. Inbetriebnahme und Verbesserung
- Seite 92 und 93: 6. In situ Untersuchung der magneti
- Seite 94 und 95: 6. In situ Untersuchung der magneti
- Seite 96 und 97: 6. In situ Untersuchung der magneti
- Seite 98 und 99: 6. In situ Untersuchung der magneti
- Seite 100 und 101: 6. In situ Untersuchung der magneti
- Seite 103 und 104: 7. Der ferromagnetische Halbleiter
- Seite 105 und 106: 7.2. Elektronische Eigenschaften vo
- Seite 107 und 108: 7.2. Elektronische Eigenschaften vo
- Seite 109 und 110: 7.3. Magnetische Eigenschaften von
- Seite 111 und 112: 7.3. Magnetische Eigenschaften von
- Seite 113 und 114: 7.4. Einwirkung von biaxialem Stres
- Seite 115 und 116: 7.5. Wachstum und Strukturierung vo
- Seite 117 und 118: 7.5. Wachstum und Strukturierung vo
- Seite 119 und 120: 7.5. Wachstum und Strukturierung vo
- Seite 121 und 122: 8. Anwendung von biaxialem Stress I
- Seite 123 und 124: 8.1. Einfluss von biaxialem Stress
- Seite 125 und 126: 8.2. Einfluss unterschiedlicher Git
- Seite 127 und 128: 9. Untersuchung des Dotierverhalten
- Seite 129 und 130: 9.2. Dotierverhalten La-dotierter E
- Seite 131 und 132: 9.3. Vergleich der La-, Gd- bzw. Lu
- Seite 133 und 134: 9.3. Vergleich der La-, Gd- bzw. Lu
- Seite 135 und 136:
9.3. Vergleich der La-, Gd- bzw. Lu
- Seite 137 und 138:
9.3. Vergleich der La-, Gd- bzw. Lu
- Seite 139 und 140:
9.3. Vergleich der La-, Gd- bzw. Lu
- Seite 141 und 142:
10. Wachstum epitaktischer EuO-Film
- Seite 143 und 144:
10.2. Untersuchung des Wachstumsmec
- Seite 145 und 146:
10.2. Untersuchung des Wachstumsmec
- Seite 147 und 148:
10.2. Untersuchung des Wachstumsmec
- Seite 149 und 150:
10.2. Untersuchung des Wachstumsmec
- Seite 151 und 152:
10.2. Untersuchung des Wachstumsmec
- Seite 153 und 154:
10.2. Untersuchung des Wachstumsmec
- Seite 155 und 156:
10.2. Untersuchung des Wachstumsmec
- Seite 157 und 158:
10.3. Eigenschaften der gesputterte
- Seite 159 und 160:
10.3. Eigenschaften der gesputterte
- Seite 161 und 162:
10.3. Eigenschaften der gesputterte
- Seite 163 und 164:
10.4. Thermodynamische Betrachtung
- Seite 165 und 166:
10.4. Thermodynamische Betrachtung
- Seite 167 und 168:
10.5. Schichtdicken- und Temperatur
- Seite 169 und 170:
10.6. Ausweitung auf andere Substra
- Seite 171 und 172:
10.7. Optimierte Titan-Schichtdicke
- Seite 173 und 174:
10.8. Oxidation des Ti-Films Intens
- Seite 175 und 176:
10.10. Herstellung Gd-dotierter Fil
- Seite 177 und 178:
10.10. Herstellung Gd-dotierter Fil
- Seite 179:
Teil IV. Zusammenfassung und Ausbli
- Seite 182 und 183:
11. Zusammenfassung Die magnetische
- Seite 184 und 185:
11. Zusammenfassung dung gebundener
- Seite 186 und 187:
12. Ausblick vorliegen. Zum anderen
- Seite 188 und 189:
12. Ausblick reicher Kandidat. Wom
- Seite 191 und 192:
A. Ergänzungen zur Dünnfilmtechno
- Seite 193 und 194:
A.1. Reflektometrie Mithilfe der Br
- Seite 195 und 196:
A.2. Weitere Methoden zur Untersuch
- Seite 197 und 198:
A.2. Weitere Methoden zur Untersuch
- Seite 199 und 200:
A.2. Weitere Methoden zur Untersuch
- Seite 201 und 202:
B. Technische Zeichnungen Auf Seite
- Seite 203 und 204:
60,0° 45,0° 25,0° 12,0 Schnitt B
- Seite 205 und 206:
C. Wachstum von Kupfer auf Silizium
- Seite 207 und 208:
10 5 Cu(111) Si(220) Cu(222) Si(440
- Seite 209 und 210:
D. Verwendung von Eu 2 O 3 als Capp
- Seite 211 und 212:
E. Bestimmung der Curie-Temperatur
- Seite 213 und 214:
0.03 0.025 0 T 0.04 0.035 0.03 0.00
- Seite 215 und 216:
Dotant 10 G 100 G 1000 G undotiert
- Seite 217 und 218:
F. Eisen-dotierte EuO-Filme Da das
- Seite 219 und 220:
würde die Eu 2+ -Fehlstelle die vo
- Seite 221 und 222:
G. Berechnung thermodynamischer Pot
- Seite 223 und 224:
H. Wachstum von EuO-Filmen mittels
- Seite 225 und 226:
Intensität (a. u.) 10 5 10 4 10 3
- Seite 227 und 228:
Die Curie-Temperatur des gezeigten
- Seite 229 und 230:
Magnetisches Moment (10 -4 emu) 0.0
- Seite 231 und 232:
Intensität (a. u.) 10 4 10 3 100 1
- Seite 233 und 234:
einem Eu 2 O 3 (401)-Peak aufgrund
- Seite 235 und 236:
* * THM_EuO_191 Intensität (a. u.)
- Seite 237 und 238:
Literaturverzeichnis [1] The 2011 d
- Seite 239 und 240:
Literaturverzeichnis [27] K. Lee un
- Seite 241 und 242:
Literaturverzeichnis [54] K. Y. Ahn
- Seite 243 und 244:
Literaturverzeichnis [80] G. Kienel
- Seite 245 und 246:
Literaturverzeichnis [122] KOLTER E
- Seite 247 und 248:
Literaturverzeichnis [157] A. Mauge
- Seite 249 und 250:
Literaturverzeichnis [183] N. Iwata
- Seite 251 und 252:
Literaturverzeichnis [206] D. F. F
- Seite 253 und 254:
Literaturverzeichnis [236] I. Rüte
- Seite 255 und 256:
Publikationen A T. Mairoser, A. Sch
- Seite 257 und 258:
. . . Julia Mundy, Paul Cueva, and