

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2.1. GRUNDLAGEN DER BILDVERARBEITUNG 7<br />
2.1.4 Stereodisparität<br />
Die Stereodisparität ist ein Maß für den Abstand eines Punktes M von einer Stereokamera. Sie entspricht<br />
dem Abstand d zwischen den zueinander gehörigen Projektionen (m,m ′ ) des Punktes M aus Abbildung<br />
2.3 (c) und berechnet sich über die Formel:<br />
d = |mm ′ | (2.4)<br />
Nach Li [7] gilt hierbei, dass weit entfernte Punkte einen kleinen, und nahe Punkte einen großen Disparitätswert<br />
ergeben. Die Abbildungen der Punkte rücken auseinander, je näher dieser an der Stereokamera<br />
liegt.<br />
Die Stereodisparität wird dazu verwendet, ein Tiefenbild aus den zwei Einzelbildern einer Stereokamera<br />
zu berechnen, indem Featurepunkte des linken Bildes denselben Features im rechten Bild zugeordnet<br />
werden. Dies wird durch die vorangehende Rektifizierung der Kamerabilder vereinfacht, da sichergestellt<br />
ist, dass sich zueinander gehörige Merkmale auf derselben Scanline im Bild befinden. Somit muss<br />
nur in einer Dimension nach dem zugehörigen Bildpunkt gesucht werden. Berechnungslücken im Disparitätsbild<br />
können durch homogene Flächen entstehen, da diese keine Featurpunkte enhalten. Für die<br />
Disparitätsberechnung müssen die Einzelbilder möglichst zeitgleich aufgenommen werden, da sonst<br />
bei Bewegungen ein zusätzlicher Versatz zwischen den Bildern entstehen kann, der den Disparitätswert<br />
verfälscht. Die Begrenzung der Suche auf diskrete Abstandsstufen (Disparitätsstufen) kann den Rechenaufwand<br />
begrenzen.<br />
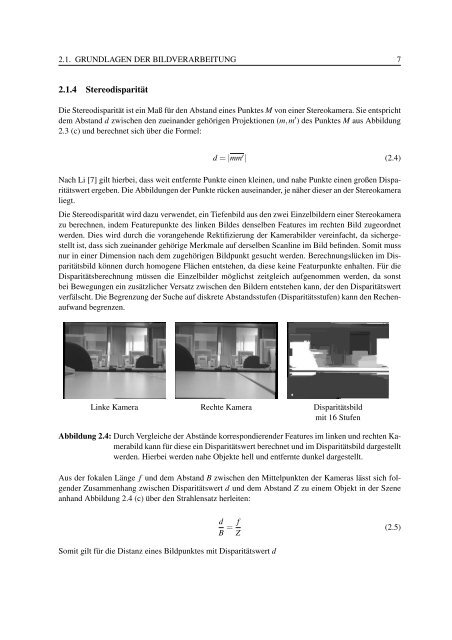
Linke Kamera Rechte Kamera Disparitätsbild<br />
mit 16 Stufen<br />
Abbildung 2.4: Durch Vergleiche der Abstände korrespondierender Features im linken und rechten Kamerabild<br />
kann für diese ein Disparitätswert berechnet und im Disparitätsbild dargestellt<br />
werden. Hierbei werden nahe Objekte hell und entfernte dunkel dargestellt.<br />
Aus der fokalen Länge f und dem Abstand B zwischen den Mittelpunkten der Kameras lässt sich folgender<br />
Zusammenhang zwischen Disparitätswert d und dem Abstand Z zu einem Objekt in der Szene<br />
anhand Abbildung 2.4 (c) über den Strahlensatz herleiten:<br />
d f<br />
=<br />
B Z<br />
Somit gilt für die Distanz eines Bildpunktes mit Disparitätswert d<br />
(2.5)
