

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
58 KAPITEL 5. ERGEBNISSE<br />
Testparcours 2: Wohnräume<br />
Aufgrund starker magnetischer Störungen im ersten Testparcours musste die Orientierung der virtuellen<br />
Kamera bei den Tests gelegentlich von Hand nachjustiert werden. Zudem stellen die vielen homogenen<br />
Flächen im Informatikgebäude ein „Worst Case Szenario“ für die Berechnung des Disparitätsbildes dar.<br />
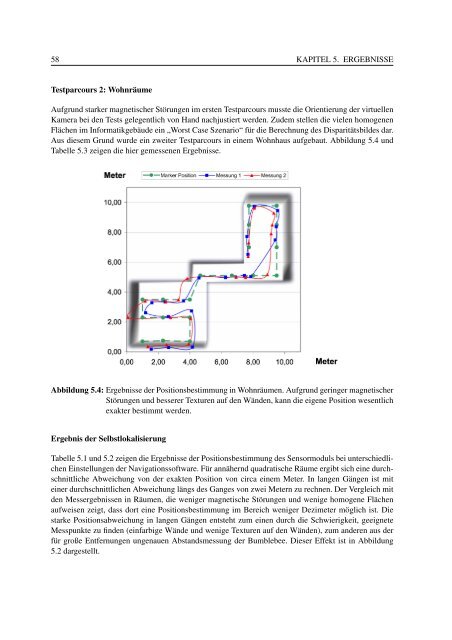
Aus diesem Grund wurde ein zweiter Testparcours in einem Wohnhaus aufgebaut. Abbildung 5.4 und<br />
Tabelle 5.3 zeigen die hier gemessenen Ergebnisse.<br />
Abbildung 5.4: Ergebnisse der Positionsbestimmung in Wohnräumen. Aufgrund geringer magnetischer<br />
Störungen und besserer Texturen auf den Wänden, kann die eigene Position wesentlich<br />
exakter bestimmt werden.<br />
Ergebnis der Selbstlokalisierung<br />
Tabelle 5.1 und 5.2 zeigen die Ergebnisse der Positionsbestimmung des Sensormoduls bei unterschiedlichen<br />
Einstellungen der Navigationssoftware. Für annähernd quadratische Räume ergibt sich eine durchschnittliche<br />
Abweichung von der exakten Position von circa einem Meter. In langen Gängen ist mit<br />
einer durchschnittlichen Abweichung längs des Ganges von zwei Metern zu rechnen. Der Vergleich mit<br />
den Messergebnissen in Räumen, die weniger magnetische Störungen und wenige homogene Flächen<br />
aufweisen zeigt, dass dort eine Positionsbestimmung im Bereich weniger Dezimeter möglich ist. Die<br />
starke Positionsabweichung in langen Gängen entsteht zum einen durch die Schwierigkeit, geeignete<br />
Messpunkte zu finden (einfarbige Wände und wenige Texturen auf den Wänden), zum anderen aus der<br />
für große Entfernungen ungenauen Abstandsmessung der Bumblebee. Dieser Effekt ist in Abbildung<br />
5.2 dargestellt.
