

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
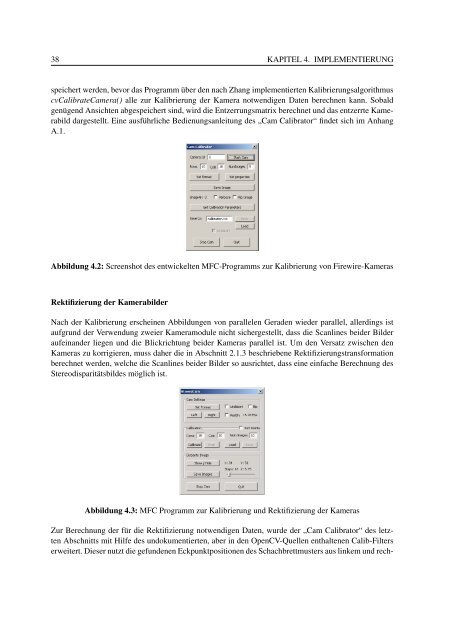
38 KAPITEL 4. IMPLEMENTIERUNG<br />
speichert werden, bevor das Programm über den nach Zhang implementierten Kalibrierungsalgorithmus<br />
cvCalibrateCamera() alle zur Kalibrierung der Kamera notwendigen Daten berechnen kann. Sobald<br />
genügend Ansichten abgespeichert sind, wird die Entzerrungsmatrix berechnet und das entzerrte Kamerabild<br />
dargestellt. Eine ausführliche Bedienungsanleitung des „Cam Calibrator“ findet sich im Anhang<br />
A.1.<br />
Abbildung 4.2: Screenshot des entwickelten MFC-Programms zur Kalibrierung von Firewire-Kameras<br />
Rektifizierung der Kamerabilder<br />
Nach der Kalibrierung erscheinen Abbildungen von parallelen Geraden wieder parallel, allerdings ist<br />
aufgrund der Verwendung zweier Kameramodule nicht sichergestellt, dass die Scanlines beider Bilder<br />
aufeinander liegen und die Blickrichtung beider Kameras parallel ist. Um den Versatz zwischen den<br />
Kameras zu korrigieren, muss daher die in Abschnitt 2.1.3 beschriebene Rektifizierungstransformation<br />
berechnet werden, welche die Scanlines beider Bilder so ausrichtet, dass eine einfache Berechnung des<br />
Stereodisparitätsbildes möglich ist.<br />
Abbildung 4.3: MFC Programm zur Kalibrierung und Rektifizierung der Kameras<br />
Zur Berechnung der für die Rektifizierung notwendigen Daten, wurde der „Cam Calibrator“ des letzten<br />
Abschnitts mit Hilfe des undokumentierten, aber in den OpenCV-Quellen enthaltenen Calib-Filters<br />
erweitert. Dieser nutzt die gefundenen Eckpunktpositionen des Schachbrettmusters aus linkem und rech-
