

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3.2. LÖSUNGSANSATZ 33<br />
Die Selbstlokalisation des Navigationsassistenten über Stereokamera und Richtungssensor gibt dem<br />
blinden Benutzer Auskunft über seinen aktuellen Aufenthaltsraum. Ein Abtaststrahl im Zentrum des virtuellen<br />
Blickfeldes ermöglicht ihm zudem die Erforschung der Umgebung durch einfaches „Umsehen“.<br />
Die Namen und die Distanzen der vom virtuellen Abtaststrahl getroffenen Objekte (siehe Abbildung<br />
3.14 (a) orange markiert) können Aufschluss über die Beschaffenheit der Umgebung geben. Durch die<br />
Extrapolation der augenblicklichen Bewegung kann über eine modellbasierte Kollisionserkennung vor<br />
Hindernissen gewarnt werden (siehe Abbildung 3.14 (b)). Der Vergleich zwischen realen und virtuellen<br />
Abständen ermöglicht zudem einen Hinweis auf den Zustand von Türen (Abbildung 3.14 (c-d)).<br />
Der Blinde erhält vom Navigationsassistenten somit zusätzliche Informationen über seine Umgebung,<br />
welche ihm die Navigation durch das fremde Gebäude erleichtern können.<br />
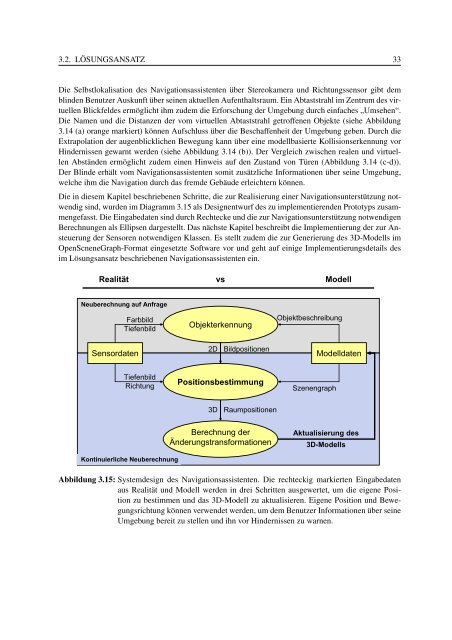
Die in diesem Kapitel beschriebenen Schritte, die zur Realisierung einer Navigationsunterstützung notwendig<br />
sind, wurden im Diagramm 3.15 als Designentwurf des zu implementierenden Prototyps zusammengefasst.<br />
Die Eingabedaten sind durch Rechtecke und die zur Navigationsunterstützung notwendigen<br />
Berechnungen als Ellipsen dargestellt. Das nächste Kapitel beschreibt die Implementierung der zur Ansteuerung<br />
der Sensoren notwendigen Klassen. Es stellt zudem die zur Generierung des 3D-Modells im<br />
OpenScneneGraph-Format eingesetzte Software vor und geht auf einige Implementierungsdetails des<br />
im Lösungsansatz beschriebenen Navigationsassistenten ein.<br />
Realität vs<br />
Modell<br />
Neuberechnung auf Anfrage<br />
Farbbild<br />
Tiefenbild<br />
Objekterkennung<br />
Objektbeschreibung<br />
2D Bildpositionen<br />
Sensordaten Modelldaten<br />
Tiefenbild<br />
Richtung<br />
Positionsbestimmung<br />
Szenengraph<br />
Kontinuierliche Neuberechnung<br />
3D Raumpositionen<br />
Berechnung der<br />
Änderungstransformationen<br />
Aktualisierung des<br />
3D-Modells<br />
Abbildung 3.15: Systemdesign des Navigationsassistenten. Die rechteckig markierten Eingabedaten<br />
aus Realität und Modell werden in drei Schritten ausgewertet, um die eigene Position<br />
zu bestimmen und das 3D-Modell zu aktualisieren. Eigene Position und Bewegungsrichtung<br />
können verwendet werden, um dem Benutzer Informationen über seine<br />
Umgebung bereit zu stellen und ihn vor Hindernissen zu warnen.
