

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Kapitel 4<br />
Implementierung<br />
Dieses Kapitel beschreibt die Umsetzung des in Abschnitt 3.2 vorgestellten Lösungsansatzes und die<br />
zur Lösung der einzelnen Teilaufgaben implementierten Klassen. Die Struktur des implementierten Navigationsprogramms<br />
folgt dem in Abbildung 3.15 dargestellten Systemdesign.<br />
Zunächst müssen die Sensordaten erfasst und entsprechend aufbereitet werden, um diese dann mit den<br />
Modelldaten vergleichen zu können. Der nächste Abschnitt beschreibt die Auswahl und Ansteuerung<br />
der hierfür notwendigen Sensorhardware, die schließlich im Prototyp (siehe Abschnitt 3.2.1) eingesetzt<br />
wurde.<br />
4.1 Sensordatenerfassung<br />
Über das Nexus-Teilprojekt D2 standen eine Vielzahl an IEEE-1394 (Firewire) Digitalkameras und anderen<br />
Sensoren zur Verfügung. Diese wurden zu Beginn dieser Arbeit vor dem Erwerb einer „Bumblebee“-<br />
Kamera, in den ersten Monaten der Arbeit, auf ihre Eignung zur Gewinnung der Disparitätsbilder getestet.<br />
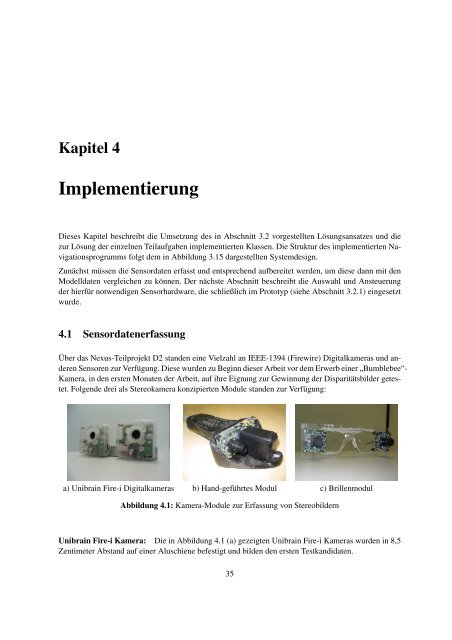
Folgende drei als Stereokamera konzipierten Module standen zur Verfügung:<br />
a) Unibrain Fire-i Digitalkameras b) Hand-geführtes Modul c) Brillenmodul<br />
Abbildung 4.1: Kamera-Module zur Erfassung von Stereobildern<br />
Unibrain Fire-i Kamera: Die in Abbildung 4.1 (a) gezeigten Unibrain Fire-i Kameras wurden in 8,5<br />
Zentimeter Abstand auf einer Aluschiene befestigt und bilden den ersten Testkandidaten.<br />
35
