

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
18 KAPITEL 3. LÖSUNGSENTWURF<br />
3.2 Lösungsansatz<br />
Dieser Ansatz versucht über die Möglichkeiten der bisher vorgestellten Arbeiten (siehe Abschnitt 2.3)<br />
hinauszugehen, indem er einige Ideen der Vorarbeiten kombiniert. Eine starke Verknüpfung zwischen<br />
Sensordaten und Modell stellt hierbei die Grundlage für die später an den Benutzer weitergegebenen<br />
Navigationsinformationen dar. Die zur Navigation des blinden Benutzers notwendige Bestimmung der<br />
eigenen Position im Raum sowie die Erkennung von Hindernissen löst dieser Ansatz durch eine kontinuierliche<br />
Anpassung einer virtuellen Umgebung an real gemessene Daten. Zur Messung der notwendigen<br />
Daten wird ein Sensormodul eingesetzt, das im folgenden Abschnitt beschrieben wird.<br />
3.2.1 Aufbau des Sensormoduls<br />
Dieser Abschnitt stellt den zur Lösung der Aufgabe eingesetzten Aufbau des Sensormoduls und die<br />
verwendete Hardware vor. Gründe für die Auswahl dieser Hardwarekomponenten werden in Abschnitt<br />
4.1 ausführlicher beschrieben.<br />
Die Entscheidung, das Sensormodul nicht wie in der in Abschnitt 2.3.2 vorgestellten Designstudie in den<br />
Blindenstock zu integrieren und darum den zugehörigen ersten Prototyp nicht zu verwenden, begründet<br />
sich in der Tatsache, dass sich die zur Selbstlokalisation in Räumen notwendigen Abstandsinformationen<br />
auf gebäudespezifische, invariante Daten wie Abstände zu Wänden und Türen beschränken. Bei allen<br />
anderen Einrichtungsgegenständen muss davon ausgegangen werden, dass sich deren Position ändern<br />
kann oder sie nicht ins Modell integriert sind. Um sicherzustellen, dass diese Informationen möglichst<br />
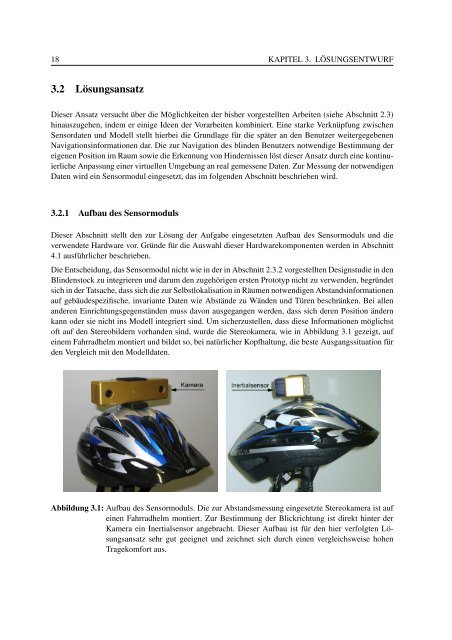
oft auf den Stereobildern vorhanden sind, wurde die Stereokamera, wie in Abbildung 3.1 gezeigt, auf<br />
einem Fahrradhelm montiert und bildet so, bei natürlicher Kopfhaltung, die beste Ausgangssituation für<br />
den Vergleich mit den Modelldaten.<br />
Abbildung 3.1: Aufbau des Sensormoduls. Die zur Abstandsmessung eingesetzte Stereokamera ist auf<br />
einen Fahrradhelm montiert. Zur Bestimmung der Blickrichtung ist direkt hinter der<br />
Kamera ein Inertialsensor angebracht. Dieser Aufbau ist für den hier verfolgten Lösungsansatz<br />
sehr gut geeignet und zeichnet sich durch einen vergleichsweise hohen<br />
Tragekomfort aus.
