

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4.1. SENSORDATENERFASSUNG 43<br />
Geschwindigkeitsvergleich zwischen den Berechnungsverfahren<br />
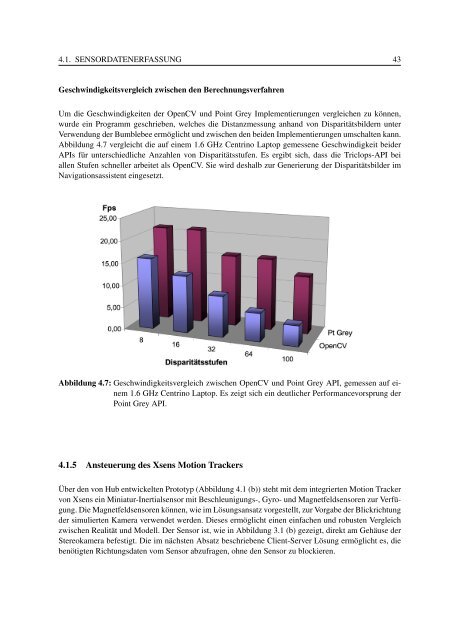
Um die Geschwindigkeiten der OpenCV und Point Grey Implementierungen vergleichen zu können,<br />
wurde ein Programm geschrieben, welches die Distanzmessung anhand von Disparitätsbildern unter<br />
Verwendung der Bumblebee ermöglicht und zwischen den beiden Implementierungen umschalten kann.<br />
Abbildung 4.7 vergleicht die auf einem 1.6 GHz Centrino Laptop gemessene Geschwindigkeit beider<br />
APIs für unterschiedliche Anzahlen von Disparitätsstufen. Es ergibt sich, dass die Triclops-API bei<br />
allen Stufen schneller arbeitet als OpenCV. Sie wird deshalb zur Generierung der Disparitätsbilder im<br />
Navigationsassistent eingesetzt.<br />
Abbildung 4.7: Geschwindigkeitsvergleich zwischen OpenCV und Point Grey API, gemessen auf einem<br />
1.6 GHz Centrino Laptop. Es zeigt sich ein deutlicher Performancevorsprung der<br />
Point Grey API.<br />
4.1.5 Ansteuerung des Xsens Motion Trackers<br />
Über den von Hub entwickelten Prototyp (Abbildung 4.1 (b)) steht mit dem integrierten Motion Tracker<br />
von Xsens ein Miniatur-Inertialsensor mit Beschleunigungs-, Gyro- und Magnetfeldsensoren zur Verfügung.<br />
Die Magnetfeldsensoren können, wie im Lösungsansatz vorgestellt, zur Vorgabe der Blickrichtung<br />
der simulierten Kamera verwendet werden. Dieses ermöglicht einen einfachen und robusten Vergleich<br />
zwischen Realität und Modell. Der Sensor ist, wie in Abbildung 3.1 (b) gezeigt, direkt am Gehäuse der<br />
Stereokamera befestigt. Die im nächsten Absatz beschriebene Client-Server Lösung ermöglicht es, die<br />
benötigten Richtungsdaten vom Sensor abzufragen, ohne den Sensor zu blockieren.
