

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
2.3. VORARBEITEN UND VERWENDETE APIS 13<br />
2.3 Vorarbeiten und verwendete APIs<br />
Dieser Abschnitt beschreibt die Vorarbeiten, die zur Lösung einiger Teilprobleme verwendet wurden<br />
und verweist auf die zur Implementierung eingesetzten Bibliotheken und APIs.<br />
2.3.1 Farbklassifizierung<br />
Hub und Teufel stellen in [15] ein Modell zur Klassifikation von Farben entsprechend der menschlichen<br />
Farbwahrnehmung vor. Dieses Modell basiert auf psychophysischen Experimenten zum simultanen<br />
Farbkonstrast und zur Farbbenennung und trägt dem Einfluss benachbarter Farben auf die wahrgenommene<br />
Farbe Rechnung. Es lässt sich auf reale Szenen anwenden, um die wahrgenommene Farbe<br />
einer Bildregion unabhängig vom Hintergrund zu bestimmen und lässt sich somit zur Suche nach Objekten<br />
mit bekannter Farbe in der Bildanalyse einsetzen.<br />
2.3.2 Navigation Assistance System (NAS)<br />
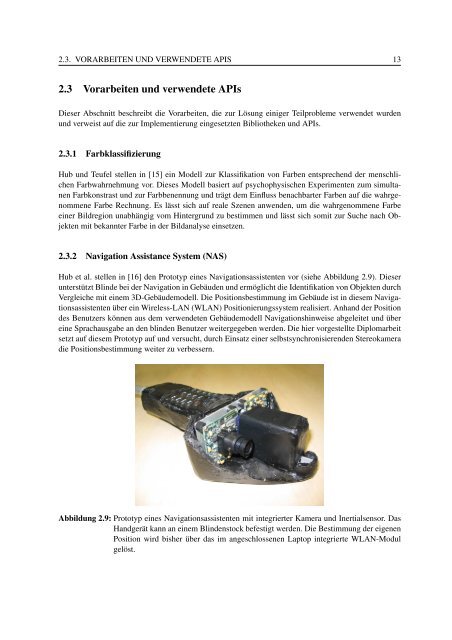
Hub et al. stellen in [16] den Prototyp eines Navigationsassistenten vor (siehe Abbildung 2.9). Dieser<br />
unterstützt Blinde bei der Navigation in Gebäuden und ermöglicht die Identifikation von Objekten durch<br />
Vergleiche mit einem 3D-Gebäudemodell. Die Positionsbestimmung im Gebäude ist in diesem Navigationsassistenten<br />
über ein Wireless-LAN (WLAN) Positionierungssystem realisiert. Anhand der Position<br />
des Benutzers können aus dem verwendeten Gebäudemodell Navigationshinweise abgeleitet und über<br />
eine Sprachausgabe an den blinden Benutzer weitergegeben werden. Die hier vorgestellte Diplomarbeit<br />
setzt auf diesem Prototyp auf und versucht, durch Einsatz einer selbstsynchronisierenden Stereokamera<br />
die Positionsbestimmung weiter zu verbessern.<br />
Abbildung 2.9: Prototyp eines Navigationsassistenten mit integrierter Kamera und Inertialsensor. Das<br />
Handgerät kann an einem Blindenstock befestigt werden. Die Bestimmung der eigenen<br />
Position wird bisher über das im angeschlossenen Laptop integrierte WLAN-Modul<br />
gelöst.
