

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3.2. LÖSUNGSANSATZ 25<br />
Charakteristische Linien<br />
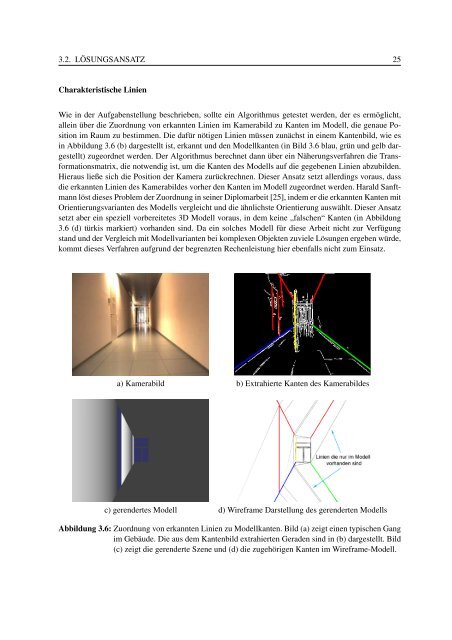
Wie in der Aufgabenstellung beschrieben, sollte ein Algorithmus getestet werden, der es ermöglicht,<br />
allein über die Zuordnung von erkannten Linien im Kamerabild zu Kanten im Modell, die genaue Position<br />
im Raum zu bestimmen. Die dafür nötigen Linien müssen zunächst in einem Kantenbild, wie es<br />
in Abbildung 3.6 (b) dargestellt ist, erkannt und den Modellkanten (in Bild 3.6 blau, grün und gelb dargestellt)<br />
zugeordnet werden. Der Algorithmus berechnet dann über ein Näherungsverfahren die Transformationsmatrix,<br />
die notwendig ist, um die Kanten des Modells auf die gegebenen Linien abzubilden.<br />
Hieraus ließe sich die Position der Kamera zurückrechnen. Dieser Ansatz setzt allerdings voraus, dass<br />
die erkannten Linien des Kamerabildes vorher den Kanten im Modell zugeordnet werden. Harald Sanftmann<br />
löst dieses Problem der Zuordnung in seiner Diplomarbeit [25], indem er die erkannten Kanten mit<br />
Orientierungsvarianten des Modells vergleicht und die ähnlichste Orientierung auswählt. Dieser Ansatz<br />
setzt aber ein speziell vorbereitetes 3D Modell voraus, in dem keine „falschen“ Kanten (in Abbildung<br />
3.6 (d) türkis markiert) vorhanden sind. Da ein solches Modell für diese Arbeit nicht zur Verfügung<br />
stand und der Vergleich mit Modellvarianten bei komplexen Objekten zuviele Lösungen ergeben würde,<br />
kommt dieses Verfahren aufgrund der begrenzten Rechenleistung hier ebenfalls nicht zum Einsatz.<br />
a) Kamerabild b) Extrahierte Kanten des Kamerabildes<br />
c) gerendertes Modell d) Wireframe Darstellung des gerenderten Modells<br />
Abbildung 3.6: Zuordnung von erkannten Linien zu Modellkanten. Bild (a) zeigt einen typischen Gang<br />
im Gebäude. Die aus dem Kantenbild extrahierten Geraden sind in (b) dargestellt. Bild<br />
(c) zeigt die gerenderte Szene und (d) die zugehörigen Kanten im Wireframe-Modell.
