

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Kapitel 5<br />
Ergebnisse<br />
Dieses Kapitel stellt die Ergebnisse der Selbstlokalisation und Positionserkennung von verschiebbaren,<br />
modellierten Objekten vor. Es beschreibt kurz die Testbedingungen unter welchen die Ergebnisse gemessen<br />
wurden. Alle Tests wurden auf der im nächsten Absatz beschriebenen Hardware durchgeführt.<br />
5.1 Hardwarekomponenten des Navigationsassistenten<br />
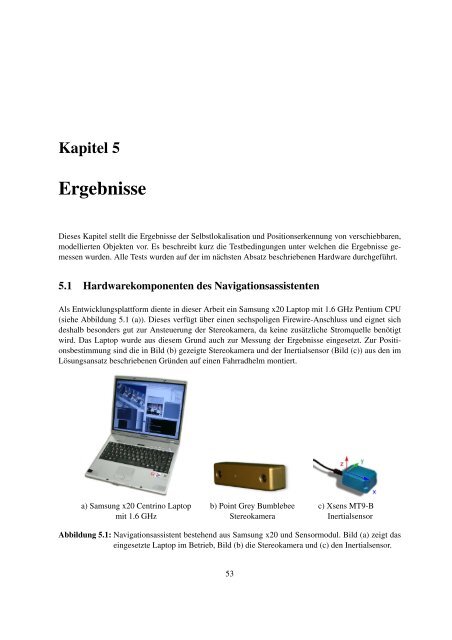
Als Entwicklungsplattform diente in dieser Arbeit ein Samsung x20 Laptop mit 1.6 GHz Pentium CPU<br />
(siehe Abbildung 5.1 (a)). Dieses verfügt über einen sechspoligen Firewire-Anschluss und eignet sich<br />
deshalb besonders gut zur Ansteuerung der Stereokamera, da keine zusätzliche Stromquelle benötigt<br />
wird. Das Laptop wurde aus diesem Grund auch zur Messung der Ergebnisse eingesetzt. Zur Positionsbestimmung<br />
sind die in Bild (b) gezeigte Stereokamera und der Inertialsensor (Bild (c)) aus den im<br />
Lösungsansatz beschriebenen Gründen auf einen Fahrradhelm montiert.<br />
a) Samsung x20 Centrino Laptop b) Point Grey Bumblebee c) Xsens MT9-B<br />
mit 1.6 GHz Stereokamera Inertialsensor<br />
Abbildung 5.1: Navigationsassistent bestehend aus Samsung x20 und Sensormodul. Bild (a) zeigt das<br />
eingesetzte Laptop im Betrieb, Bild (b) die Stereokamera und (c) den Inertialsensor.<br />
53
