

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3.2. LÖSUNGSANSATZ 27<br />
a) b)<br />
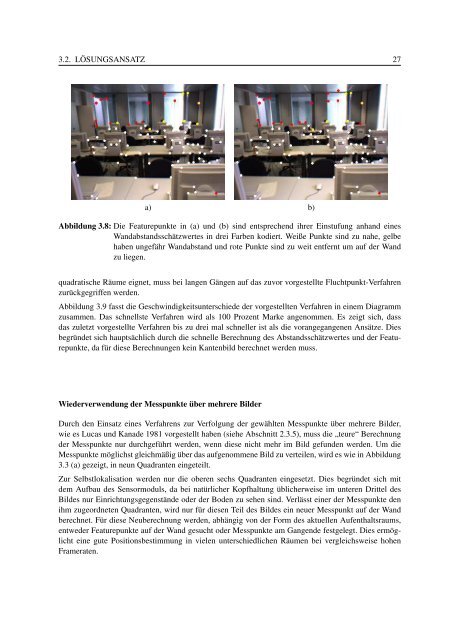
Abbildung 3.8: Die Featurepunkte in (a) und (b) sind entsprechend ihrer Einstufung anhand eines<br />
Wandabstandsschätzwertes in drei Farben kodiert. Weiße Punkte sind zu nahe, gelbe<br />
haben ungefähr Wandabstand und rote Punkte sind zu weit entfernt um auf der Wand<br />
zu liegen.<br />
quadratische Räume eignet, muss bei langen Gängen auf das zuvor vorgestellte Fluchtpunkt-Verfahren<br />
zurückgegriffen werden.<br />
Abbildung 3.9 fasst die Geschwindigkeitsunterschiede der vorgestellten Verfahren in einem Diagramm<br />
zusammen. Das schnellste Verfahren wird als 100 Prozent Marke angenommen. Es zeigt sich, dass<br />
das zuletzt vorgestellte Verfahren bis zu drei mal schneller ist als die vorangegangenen Ansätze. Dies<br />
begründet sich hauptsächlich durch die schnelle Berechnung des Abstandsschätzwertes und der Featurepunkte,<br />
da für diese Berechnungen kein Kantenbild berechnet werden muss.<br />
Wiederverwendung der Messpunkte über mehrere Bilder<br />
Durch den Einsatz eines Verfahrens zur Verfolgung der gewählten Messpunkte über mehrere Bilder,<br />
wie es Lucas und Kanade 1981 vorgestellt haben (siehe Abschnitt 2.3.5), muss die „teure“ Berechnung<br />
der Messpunkte nur durchgeführt werden, wenn diese nicht mehr im Bild gefunden werden. Um die<br />
Messpunkte möglichst gleichmäßig über das aufgenommene Bild zu verteilen, wird es wie in Abbildung<br />
3.3 (a) gezeigt, in neun Quadranten eingeteilt.<br />
Zur Selbstlokalisation werden nur die oberen sechs Quadranten eingesetzt. Dies begründet sich mit<br />
dem Aufbau des Sensormoduls, da bei natürlicher Kopfhaltung üblicherweise im unteren Drittel des<br />
Bildes nur Einrichtungsgegenstände oder der Boden zu sehen sind. Verlässt einer der Messpunkte den<br />
ihm zugeordneten Quadranten, wird nur für diesen Teil des Bildes ein neuer Messpunkt auf der Wand<br />
berechnet. Für diese Neuberechnung werden, abhängig von der Form des aktuellen Aufenthaltsraums,<br />
entweder Featurepunkte auf der Wand gesucht oder Messpunkte am Gangende festgelegt. Dies ermöglicht<br />
eine gute Positionsbestimmung in vielen unterschiedlichen Räumen bei vergleichsweise hohen<br />
Frameraten.
