

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
54 KAPITEL 5. ERGEBNISSE<br />
5.2 Distanzmessung über Stereokamera<br />
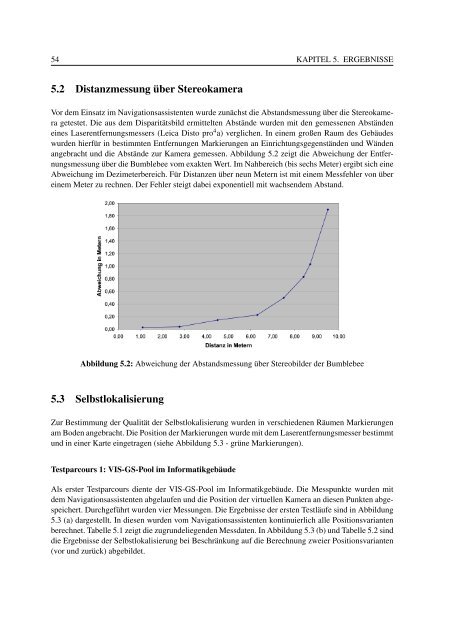
Vor dem Einsatz im Navigationsassistenten wurde zunächst die Abstandsmessung über die Stereokamera<br />
getestet. Die aus dem Disparitätsbild ermittelten Abstände wurden mit den gemessenen Abständen<br />
eines Laserentfernungsmessers (Leica Disto pro 4 a) verglichen. In einem großen Raum des Gebäudes<br />
wurden hierfür in bestimmten Entfernungen Markierungen an Einrichtungsgegenständen und Wänden<br />
angebracht und die Abstände zur Kamera gemessen. Abbildung 5.2 zeigt die Abweichung der Entfernungsmessung<br />
über die Bumblebee vom exakten Wert. Im Nahbereich (bis sechs Meter) ergibt sich eine<br />
Abweichung im Dezimeterbereich. Für Distanzen über neun Metern ist mit einem Messfehler von über<br />
einem Meter zu rechnen. Der Fehler steigt dabei exponentiell mit wachsendem Abstand.<br />
Abbildung 5.2: Abweichung der Abstandsmessung über Stereobilder der Bumblebee<br />
5.3 Selbstlokalisierung<br />
Zur Bestimmung der Qualität der Selbstlokalisierung wurden in verschiedenen Räumen Markierungen<br />
am Boden angebracht. Die Position der Markierungen wurde mit dem Laserentfernungsmesser bestimmt<br />
und in einer Karte eingetragen (siehe Abbildung 5.3 - grüne Markierungen).<br />
Testparcours 1: VIS-GS-Pool im Informatikgebäude<br />
Als erster Testparcours diente der VIS-GS-Pool im Informatikgebäude. Die Messpunkte wurden mit<br />
dem Navigationsassistenten abgelaufen und die Position der virtuellen Kamera an diesen Punkten abgespeichert.<br />
Durchgeführt wurden vier Messungen. Die Ergebnisse der ersten Testläufe sind in Abbildung<br />
5.3 (a) dargestellt. In diesen wurden vom Navigationsassistenten kontinuierlich alle Positionsvarianten<br />
berechnet. Tabelle 5.1 zeigt die zugrundeliegenden Messdaten. In Abbildung 5.3 (b) und Tabelle 5.2 sind<br />
die Ergebnisse der Selbstlokalisierung bei Beschränkung auf die Berechnung zweier Positionsvarianten<br />
(vor und zurück) abgebildet.
