

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
48 KAPITEL 4. IMPLEMENTIERUNG<br />
4.3 Positionsbestimmung<br />
Ausgehend von den Modell- und Sensordaten wird in diesem Abschnitt auf die relevanten Berechnungsschritte<br />
des Navigationsprogramms eingegangen. Die zentralen Bestandteile sind die Objekterkennung,<br />
die Bestimmung der eigenen Position und der erkannten Objekte, sowie die Aktualisierung des Modells<br />
(Abbildung 4.12 (b))<br />
Realität vs<br />
Modell<br />
Neuberechnung auf Anfrage<br />
Farbbild<br />
Tiefenbild<br />
Objekterkennung<br />
Objektbeschreibung<br />
2D Bildpositionen<br />
Sensordaten Modelldaten<br />
Tiefenbild<br />
Richtung<br />
Positionsbestimmung<br />
Szenengraph<br />
Kontinuierliche Neuberechnung<br />
3D Raumpositionen<br />
Berechnung der<br />
Änderungstransformationen<br />
Aktualisierung des<br />
3D-Modells<br />
Objekterkennung<br />
2D Bildpositionen<br />
Positionsbestimmung<br />
3D Raumpositionen<br />
Berechnung der<br />
Änderungstransformationen<br />
a) Systemdesign b) Berechnungsschritte des<br />
Navigationsprogramms<br />
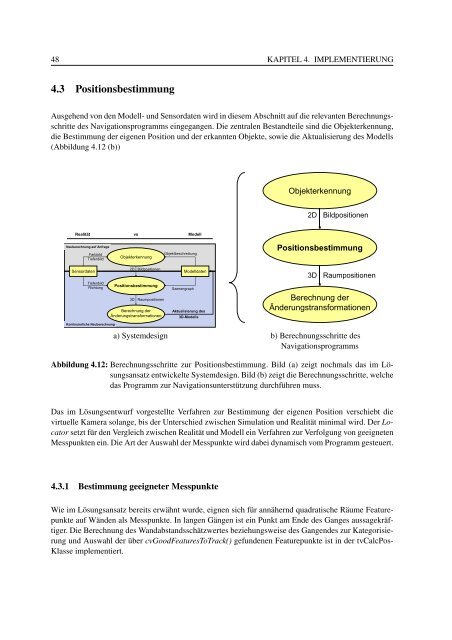
Abbildung 4.12: Berechnungsschritte zur Positionsbestimmung. Bild (a) zeigt nochmals das im Lösungsansatz<br />
entwickelte Systemdesign. Bild (b) zeigt die Berechnungsschritte, welche<br />
das Programm zur Navigationsunterstützung durchführen muss.<br />
Das im Lösungsentwurf vorgestellte Verfahren zur Bestimmung der eigenen Position verschiebt die<br />
virtuelle Kamera solange, bis der Unterschied zwischen Simulation und Realität minimal wird. Der Locator<br />
setzt für den Vergleich zwischen Realität und Modell ein Verfahren zur Verfolgung von geeigneten<br />
Messpunkten ein. Die Art der Auswahl der Messpunkte wird dabei dynamisch vom Programm gesteuert.<br />
4.3.1 Bestimmung geeigneter Messpunkte<br />
Wie im Lösungsansatz bereits erwähnt wurde, eignen sich für annähernd quadratische Räume Featurepunkte<br />
auf Wänden als Messpunkte. In langen Gängen ist ein Punkt am Ende des Ganges aussagekräftiger.<br />
Die Berechnung des Wandabstandsschätzwertes beziehungsweise des Gangendes zur Kategorisierung<br />
und Auswahl der über cvGoodFeaturesToTrack() gefundenen Featurepunkte ist in der tvCalcPos-<br />
Klasse implementiert.
