

Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen
Schriftliche Ausarbeitung herunterladen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
40 KAPITEL 4. IMPLEMENTIERUNG<br />
Die Starthöhe des Pendels kann über die Energieerhaltungsgleichung<br />
E = mgh = 1<br />
2 mv2<br />
h = 1<br />
2g v2 =<br />
1<br />
2 ∗ 9.81 (5/3.6)2<br />
� m 2 s 2<br />
m s 2<br />
�<br />
= 0.1[m] (4.1)<br />
so gewählt werden, dass es mit einer Geschwindigkeit von 5 km m<br />
h (≈ 1.4 s ) an der Kamera vorbei schwingt.<br />
Dies entspricht der anzunehmenden Laufgeschwindigkeit des Benutzers. Über die hinter dem Pendel<br />
angebrachte Skala kann der Zeitversatz zwischen den Bildern aus der Geschwindigkeit des Pendels<br />
berechnet werden. Die Zeit pro Skaleneinheit (0.01Meter) ergibt sich aus:<br />
s = vt<br />
t = 0.01<br />
1.4<br />
�<br />
m s<br />
�<br />
= 7.1[ms] (4.2)<br />
m<br />
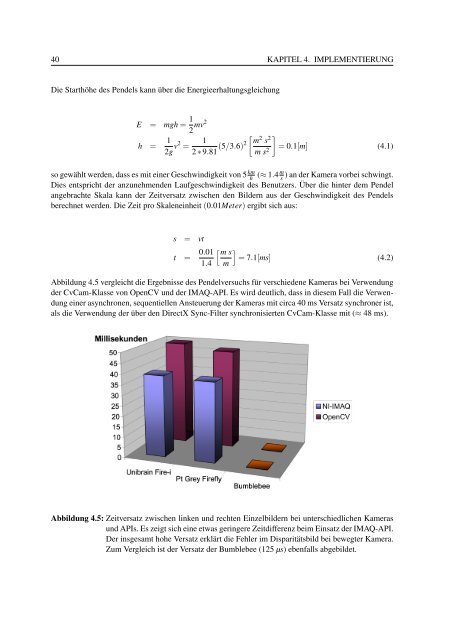
Abbildung 4.5 vergleicht die Ergebnisse des Pendelversuchs für verschiedene Kameras bei Verwendung<br />
der CvCam-Klasse von OpenCV und der IMAQ-API. Es wird deutlich, dass in diesem Fall die Verwendung<br />
einer asynchronen, sequentiellen Ansteuerung der Kameras mit circa 40 ms Versatz synchroner ist,<br />
als die Verwendung der über den DirectX Sync-Filter synchronisierten CvCam-Klasse mit (≈ 48 ms).<br />
Abbildung 4.5: Zeitversatz zwischen linken und rechten Einzelbildern bei unterschiedlichen Kameras<br />
und APIs. Es zeigt sich eine etwas geringere Zeitdifferenz beim Einsatz der IMAQ-API.<br />
Der insgesamt hohe Versatz erklärt die Fehler im Disparitätsbild bei bewegter Kamera.<br />
Zum Vergleich ist der Versatz der Bumblebee (125 µs) ebenfalls abgebildet.
