Project Cyclops, A Design... - Department of Earth and Planetary ...
Project Cyclops, A Design... - Department of Earth and Planetary ...
Project Cyclops, A Design... - Department of Earth and Planetary ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
tqOT<br />
APPENDIX<br />
C<br />
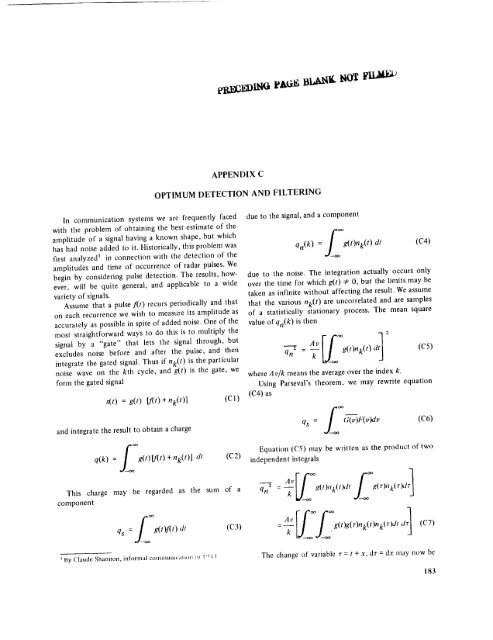
OPTIMUM DETECTION AND FILTERING<br />
In communication systems we are frequently faced<br />
with the problem <strong>of</strong> obtaining the best estimate <strong>of</strong> the<br />
amplitude <strong>of</strong> a signal having a known shape, but which<br />
has had noise added to it. Historically, this problem was<br />
first analyzed t in connection with the detection <strong>of</strong> the<br />
amplitudes <strong>and</strong> time <strong>of</strong> occurrence <strong>of</strong> radar pulses. We<br />
begin by considering pulse detection. The results, however,<br />
will be quite general, <strong>and</strong> applicable to a wide<br />
variety<br />
<strong>of</strong> signals.<br />
Assume that a pulse f(t) recurs periodically <strong>and</strong> that<br />
on each recurrence we wish to measure its amplitude as<br />
accurately as possible in spite <strong>of</strong> added noise. One <strong>of</strong> the<br />
most straightforward ways to do this is to multiply the<br />
signal by a "gate" that lets the signal through, but<br />
excludes noise before <strong>and</strong> after the pulse, <strong>and</strong> then<br />
integrate the gated signal. Thus if nk(t ) is the particular<br />
noise wave on the kth cycle, <strong>and</strong> g(t) is the gate, we<br />
form the gated signal<br />
s(t) = g(t) If(t) + nk(t)] (C1)<br />
due to the signal, <strong>and</strong><br />
a component<br />
qn(k) = L_g(t)nk(t) dt<br />
(C4)<br />
due to the noise. The integration actually occurs only<br />
over the time for which g(t) 4= 0, but the limits may be<br />
taken as infinite without affecting the result. We assume<br />
that the various nk(t ) are uncorrelated <strong>and</strong> are samples<br />
<strong>of</strong> a statistically stationary process. The mean square<br />
value <strong>of</strong> qn(k) is then<br />
_-A _k<br />
where A p/k means the average over the index k.<br />
Using Parseval's theorem, we may rewrite equation<br />
(C4) as<br />
(c5)<br />
<strong>and</strong> integrate the result to obtain a charge<br />
£<br />
q(k) = g(t)[f(t) + nk(t)] dt (C2)<br />
qs = v v<br />
(C6)<br />
v---.O0<br />
Equation (C5) may be written as the product <strong>of</strong> two<br />
independent integrals<br />
This charge may be regarded as the sum <strong>of</strong> a<br />
component<br />
qn 2 = _]___ g(t)nk(t)dt g(r)nk(r)d<br />
_'-..-o0<br />
oo<br />
qs<br />
= J--oo g(t)f(t) dt (C3)<br />
=-/-I.]_ 1 "g(t)g(r)nk(t)nk(T)dt d (C7)<br />
By Claude Shannon, informal C(}lnlBulliCal i_ll Ill loll<br />
The change <strong>of</strong> variable r = t + x, dr = dx/nay now be<br />
183