Skript - Fachgebiet Leistungselektronik und Elektrische ...
Skript - Fachgebiet Leistungselektronik und Elektrische ...
Skript - Fachgebiet Leistungselektronik und Elektrische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
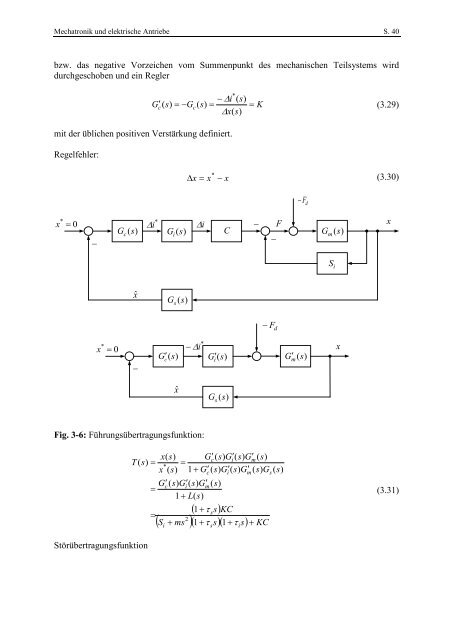
Mechatronik <strong>und</strong> elektrische Antriebe S. 40bzw. das negative Vorzeichen vom Summenpunkt des mechanischen Teilsystems wirddurchgeschoben <strong>und</strong> ein Regler*c =− ∆i( s)G′( s)= −Gc( s)=∆x(s)K(3.29)mit der üblichen positiven Verstärkung definiert.Regelfehler:*∆x= x − x(3.30)− F dx * = 0−G c (s)*∆i∆i− FG i (s) C G m (s)−SixxˆG s)(s)− F dx * = 0−G c′(s*− ∆iG i′(s)G m′ (s)xxˆ(s) G sFig. 3-6: Führungsübertragungsfunktion:x(s)Gc′( s)Gi′( s)Gm′( s)T ( s)= =*x ( s)1+Gc′( s)Gi′( s)Gm′( s)GGc′( s)Gi′( s)Gm′( s)=1+L(s)=( 1+τ ss)KC2( S + ms )( 1+τ s)( 1+τ s) + KCisis( s)(3.31)Störübertragungsfunktion


![[ ] Ï - Fachgebiet Leistungselektronik und Elektrische Antriebstechnik](https://img.yumpu.com/51151382/1/184x260/-i-fachgebiet-leistungselektronik-und-elektrische-antriebstechnik.jpg?quality=85)