Skript - Fachgebiet Leistungselektronik und Elektrische ...
Skript - Fachgebiet Leistungselektronik und Elektrische ...
Skript - Fachgebiet Leistungselektronik und Elektrische ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
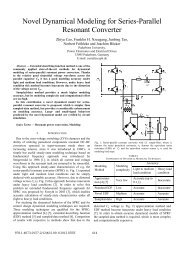
Mechatronik <strong>und</strong> elektrische Antriebe S. 66erforderlich. Diese Gleichungen erinnern an das Verhalten des Ankerkreises einesGleichstrommotors. Auch dort haben wir einen ohmschen <strong>und</strong> einen induktivenSpannungsabfall sowie eine drehzahlabhängige EMK als Gegenspannung.Abhängig von der Drehzahl sollen nun im Folgenden die zeitlichen Verläufe für denArbeitszyklus qualitativ skizziert werden. Hierbei wird die speisende elektrischeEnergieversorgung als ideal steuerbare Quelle betrachtet, wobei allerdings eineSpannungsbegrenzung − U < u( t < U berücksichtigt werden soll.max )maxLi 0επ= −2onε off = 0iε = ωtψε = 0U maxuε = ωtW meε = ε 0ε = ωt−U maxi 0iFig. 4-10: Verläufe bei kleiner DrehzahlBei kleiner Drehzahl wird der Strom bei kleinster Induktivität ein- <strong>und</strong> in der ausgerichtetenPosition wieder ausgeschaltet. Um den Strom möglichst schnell ein- <strong>und</strong> wiederauszuschalten, werden die maximal <strong>und</strong> minimal verfügbaren Spannungen verwendet. DerStromanstieg ist steiler als der Abfall beim Ausschalten, weil in der ausgerichteten Positiondie Induktivität größer ist als beim Einschalten. Wird Anstieg <strong>und</strong> Abfall des Strom in denBereichen mit näherungsweiser konstanter Induktivität bewerkstelligt, entspricht diegewandelte Energie dem aus der Idealisierung erwarteten Wert (s. linkes Teilbild).


![[ ] Ï - Fachgebiet Leistungselektronik und Elektrische Antriebstechnik](https://img.yumpu.com/51151382/1/184x260/-i-fachgebiet-leistungselektronik-und-elektrische-antriebstechnik.jpg?quality=85)