Skript - Fachgebiet Leistungselektronik und Elektrische ...
Skript - Fachgebiet Leistungselektronik und Elektrische ...
Skript - Fachgebiet Leistungselektronik und Elektrische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
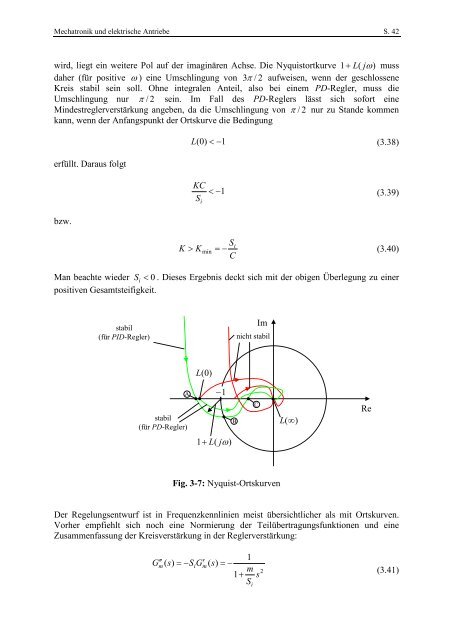
Mechatronik <strong>und</strong> elektrische Antriebe S. 42wird, liegt ein weitere Pol auf der imaginären Achse. Die Nyquistortkurve 1+ L(jω)mussdaher (für positive ω ) eine Umschlingung von 3π / 2 aufweisen, wenn der geschlosseneKreis stabil sein soll. Ohne integralen Anteil, also bei einem PD-Regler, muss dieUmschlingung nur π / 2 sein. Im Fall des PD-Reglers lässt sich sofort eineMindestreglerverstärkung angeben, da die Umschlingung von π / 2 nur zu Stande kommenkann, wenn der Anfangspunkt der Ortskurve die BedingungL ( 0) < −1(3.38)erfüllt. Daraus folgtKCS i< −1(3.39)bzw.SiK > K min = −(3.40)CMan beachte wieder S i < 0 . Dieses Ergebnis deckt sich mit der obigen Überlegung zu einerpositiven Gesamtsteifigkeit.stabil(für PID-Regler)Imnicht stabilAstabil(für PD-Regler)L(0)−11+ L(jω)CB L(∞)ReFig. 3-7: Nyquist-OrtskurvenDer Regelungsentwurf ist in Frequenzkennlinien meist übersichtlicher als mit Ortskurven.Vorher empfiehlt sich noch eine Normierung der Teilübertragungsfunktionen <strong>und</strong> eineZusammenfassung der Kreisverstärkung in der Reglerverstärkung:1Gm′( s)= −SiGm′( s)= −m1+sSi2(3.41)


![[ ] Ï - Fachgebiet Leistungselektronik und Elektrische Antriebstechnik](https://img.yumpu.com/51151382/1/184x260/-i-fachgebiet-leistungselektronik-und-elektrische-antriebstechnik.jpg?quality=85)