- Page 1 and 2:
NUM AUTOMATIC CONTROL FUNCTION PROG
- Page 3 and 4:
Table of Contents Table of Contents
- Page 5 and 6:
Table of Contents 9 Analogue Inputs
- Page 7 and 8:
Record of Revisions Record of Revis
- Page 9 and 10:
Date Revision Reason for revisions
- Page 11 and 12:
Structure of the NUM 1020/1040/1060
- Page 13 and 14:
Automatic Control Function Programm
- Page 15 and 16:
CHAPTER 8 TRANSPARENT MODE CHAPTER
- Page 17 and 18:
CHAPTER 16 PROGRAMMING IN C LANGUAG
- Page 19 and 20:
Use of the Automatic Control Functi
- Page 21 and 22:
Presentation of the Automatic Contr
- Page 23 and 24:
1.1 General Presentation of the Aut
- Page 25 and 26:
AXIS 1 INTERFACE AXIS 2 AXIS 3 AXIS
- Page 27 and 28:
µ p 68020 SYSTEM BUS BUS INTERFACE
- Page 29 and 30:
Structure of an Application 2 Struc
- Page 31 and 32:
2.1 General The machine processor c
- Page 33 and 34:
2.1.1.3 «System» I/O Card Refresh
- Page 35 and 36:
Operation of the Background Tasks N
- Page 37 and 38:
2.1.2.4 Real-Time Tasks Structure o
- Page 39 and 40:
2.1.3.2 1060 Series II- UCSII Syste
- Page 41 and 42:
2.2 Structure of an Application Str
- Page 43 and 44:
2.3 Structure of a Ladder Module -
- Page 45 and 46:
Variables 3 Variables 3.1 Principle
- Page 47 and 48:
Variables 3.8.2.19 Backward of Forw
- Page 49 and 50:
3.1 Principle of Exchanges Variable
- Page 51 and 52:
Examples %M9 points to byte 9 of th
- Page 53 and 54:
3.7 I/O Card Interface Variables %I
- Page 55 and 56:
3.7.3.2 Card Status %Irc3C.W Variab
- Page 57 and 58:
A configuration change requires mov
- Page 59 and 60:
3.7.5 Physical Organisation of Vari
- Page 61 and 62:
3.7.6 Rack and Card Identifiers 3.7
- Page 63 and 64:
3.7.8 Image Part of the 32 Discrete
- Page 65 and 66:
%Qrc00.0 to %Qrc02.7 %Irc00.0 to %I
- Page 67 and 68: %Qrc03.0 to %Qrc05.7 2nd relay modu
- Page 69 and 70: 3.7.12 Image Part of the Extension
- Page 71 and 72: 3.7.13 Image Part of the Compact Pa
- Page 73 and 74: 3.8 CNC I/O Interface Family %R and
- Page 75 and 76: Variables Variable Mnemonic Descrip
- Page 77 and 78: 3.8.1.7 Spindle Status: %R12.W Vari
- Page 79 and 80: 3.8.1.10 Other Variables Variables
- Page 81 and 82: 3.8.1.13 1050 Servo-Drive Status Wo
- Page 83 and 84: Variable Mnemonic Description %W3.0
- Page 85 and 86: 3.8.2.4 Negative JOG Commands: %WA.
- Page 87 and 88: Programme %9999.9 must be structure
- Page 89 and 90: 3.8.2.13 Spindle Controls: %W22.W V
- Page 91 and 92: - Select spindle b control: COMBRb
- Page 93 and 94: 3.8.2.16 Modes Inhibited: %W30.L Va
- Page 95 and 96: 3.8.2.19 Backward of Forward Moveme
- Page 97 and 98: 3.8.3 Inputs from the Axis Groups V
- Page 99 and 100: 3.8.3.4 Encoded M Function Without
- Page 101 and 102: Nonmodal functions A nonmodal funct
- Page 103 and 104: Variables Variable M function Defin
- Page 105 and 106: 3.8.4 Outputs to the Axis Groups Th
- Page 107 and 108: 3.8.5 System Faults and Diagnostic
- Page 109 and 110: 3.8.7 Output Card Write Enable: %W9
- Page 111 and 112: 3.8.10 Physical Organisation of %R
- Page 113 and 114: 3.9.3 Organisation of %S Common Wor
- Page 115 and 116: Language element Includes Comment V
- Page 117: B4_ARR B3_ARR B2_ARR B1_ARR B4_ROT
- Page 121 and 122: VER VER VER VER STOP STOP STOP STOP
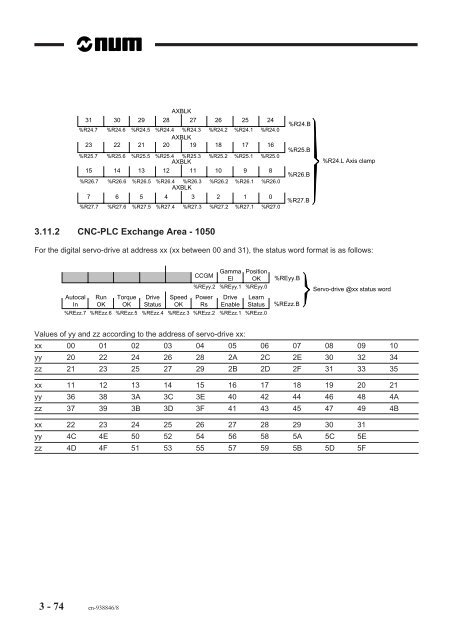
- Page 123 and 124: 3.11.4 PLC-CNC Exchange Area - 1050
- Page 125 and 126: M63 M62 M65 M64 %Rg24.7 %Rg24.6 %Rg
- Page 127 and 128: Literal Elements of Ladder Language
- Page 129 and 130: 4.1 Notations Used The notations us
- Page 131 and 132: Literal Elements of Ladder Language
- Page 133 and 134: 4.5.5 Order of Evaluation of the Ex
- Page 135 and 136: 4.5.8 Overflow - Sign Change Litera
- Page 137 and 138: Programming in Ladder Language 5 Pr
- Page 139 and 140: 5.1 Elements Common to All Types of
- Page 141 and 142: Programming in Ladder Language en-9
- Page 143 and 144: 5.2 Network Sequence 5.2.1 General
- Page 145 and 146: Example 5.2.2.3 Conditional Actions
- Page 147 and 148: Off Timeout «TOF_n» E Q %TQxx.7 T
- Page 149 and 150: Upcounters E C Q %CQxx.7 Threshold
- Page 151 and 152: 5.2.3 Structure of the Action Zone
- Page 153 and 154: Pitfall Related to Scanning Program
- Page 155 and 156: Invalid Network - Branch without Po
- Page 157 and 158: 5.2.7 Programming Hints 5.2.7.1 Opt
- Page 159 and 160: Unoptimised Network Optimised Netwo
- Page 161 and 162: 5.2.7.4 Testing the Bits of a Byte,
- Page 163 and 164: General Purpose Functions 6 General
- Page 165 and 166: General Purpose Functions 6.1 Conve
- Page 167 and 168: General Purpose Functions 6.3 BCD
- Page 169 and 170:
General Purpose Functions 6.5 Separ
- Page 171 and 172:
General Purpose Functions 6.7 Copy
- Page 173 and 174:
General Purpose Functions 6.9 Copy
- Page 175 and 176:
Return code If OK Number of charact
- Page 177 and 178:
General Purpose Functions 6.14 Simu
- Page 179 and 180:
General Purpose Functions 6.17 Sear
- Page 181 and 182:
General Purpose Functions 6.20 Jump
- Page 183 and 184:
Return code If OK Not significant.
- Page 185 and 186:
Return code If OK Value returned by
- Page 187 and 188:
Return code If OK Number of charact
- Page 189 and 190:
General Purpose Functions 6.31 Copy
- Page 191 and 192:
General Purpose Functions 6.34 Swap
- Page 193 and 194:
General Purpose Functions 6.36 Read
- Page 195 and 196:
General Purpose Functions 6.38 Init
- Page 197 and 198:
Task Management 7 Task Management 7
- Page 199 and 200:
7.1 Introduction Task Management Fo
- Page 201 and 202:
Transparent Mode 8 Transparent Mode
- Page 203 and 204:
8.1 Introduction Transparent Mode T
- Page 205 and 206:
8.1.4 Character Codes Used by %R0.W
- Page 207 and 208:
8.2 Functions Assigned to transpare
- Page 209 and 210:
Transparent Mode Operation Sends a
- Page 211 and 212:
Example 1 Consider the following va
- Page 213 and 214:
Transparent Mode 8.2.7 Open a Numer
- Page 215 and 216:
Return code Transparent Mode If OK
- Page 217 and 218:
Transparent Mode Operation putimage
- Page 219 and 220:
en-938846/7 8 - 19 Transparent Mode
- Page 221 and 222:
471 470 89 76 40 0 4 16 COL. 0 A A
- Page 223 and 224:
Transparent Mode Description Instru
- Page 225 and 226:
8.3.4 Alphanumeric Characters and I
- Page 227 and 228:
Format D (Expanded characters) 0x9B
- Page 229 and 230:
Example To position the cursor on L
- Page 231 and 232:
Definition of a Reference System Ce
- Page 233 and 234:
J: «J» [VALUE] Current Y coordina
- Page 235 and 236:
8.3.5.8 Shift Screen Origin Instruc
- Page 237 and 238:
P2 P1 P1 P2 P1 P2 N1 P3 P1 N6 P0 P0
- Page 239 and 240:
! CAUTION Arguments [CLIP], [X] and
- Page 241 and 242:
Analogue Inputs/Outputs 9 Analogue
- Page 243 and 244:
9.1 General Analogue Inputs/Outputs
- Page 245 and 246:
Analogue Inputs/Outputs 9.3 Write a
- Page 247 and 248:
Analogue Inputs/Outputs 9.5 Reassig
- Page 249 and 250:
Explicit Read/Write of Input/Output
- Page 251 and 252:
10.1 General Explicit Read/Write of
- Page 253 and 254:
Explicit Read/Write of Input/Output
- Page 255 and 256:
Interrupt Inputs 11 Interrupt Input
- Page 257 and 258:
11.1 General The automatic control
- Page 259 and 260:
11.2 Principle of Line Assignment N
- Page 261 and 262:
Example Filtering on rising edge T1
- Page 263 and 264:
Interrupt Inputs 11.6 Associate a %
- Page 265 and 266:
Serial Lines 12 Serial Lines 12.1 G
- Page 267 and 268:
12.1 General The automatic control
- Page 269 and 270:
Detail of the «format» argument 0
- Page 271 and 272:
PERIPHERAL Transmission to peripher
- Page 273 and 274:
Copy requested No. into buffer Yes
- Page 275 and 276:
Serial Lines 12.6 Control the Seria
- Page 277 and 278:
Serial Lines 12.7.2.3 Xon/Xoff Flow
- Page 279 and 280:
13.1 General Description of the Tim
- Page 281 and 282:
14.1 General Description of the Dat
- Page 283 and 284:
Exchanges by Protocol 15 Exchanges
- Page 285 and 286:
15.1 General Description of Exchang
- Page 287 and 288:
15.1.2 DNC1000 Exchange Mechanism E
- Page 289 and 290:
15.2 Objects Accessible by a UNITE
- Page 291 and 292:
15.2.2 Object Constituents The IU c
- Page 293 and 294:
Exchanges by Protocol Segment Acces
- Page 295 and 296:
Exchanges by Protocol Segment Acces
- Page 297 and 298:
Detailed List of G Functions Presen
- Page 299 and 300:
Example of reading the current prog
- Page 301 and 302:
15.3.3 «DELETE-FILE» Request Used
- Page 303 and 304:
Negative answer ANSWER CODE (1 byte
- Page 305 and 306:
Request format Answer format Positi
- Page 307 and 308:
15.3.8 «READ-BLOCK» Request Used
- Page 309 and 310:
15.3.10 «RESERVE-MEMORY» Request
- Page 311 and 312:
Exchanges by Protocol Transmission
- Page 313 and 314:
Return code If OK Code Report messa
- Page 315 and 316:
TRANSMISSION (PORT 0x30) TRANSMISSI
- Page 317 and 318:
Structure of the Transmission Buffe
- Page 319 and 320:
Structure of the Reception Buffer B
- Page 321 and 322:
Exchanges by Protocol 15.5.4 Settin
- Page 323 and 324:
Programming in C Language 16 Progra
- Page 325 and 326:
16.1 General Programming in C Langu
- Page 327 and 328:
16.4 Programming in C 16.4.1 Concep
- Page 329 and 330:
16.4.3 Exchange Area Programming in
- Page 331 and 332:
16.4.9 Library Functions Programmin
- Page 333 and 334:
16.4.9.2 Using System Functions Exa
- Page 335 and 336:
Programming in C Language Read an I
- Page 337 and 338:
Programming in C Language Initialis
- Page 339 and 340:
Programming in C Language Draw a Ci
- Page 341 and 342:
Programming in C Language Colour an
- Page 343 and 344:
Programming in C Language Read an A
- Page 345 and 346:
Programming in C Language End a Cri
- Page 347 and 348:
Programming in C Language Semaphore
- Page 349 and 350:
Programming in C Language REMARKS I
- Page 351 and 352:
Programming in C Language Write a F
- Page 353 and 354:
Description of a Directory File A d
- Page 355 and 356:
17.1 General The PLC axis programmi
- Page 357 and 358:
18 Programme Debugging 18.1 Program
- Page 359 and 360:
Programme Debugging 18.1 Programme
- Page 361 and 362:
18.2.2 Monitoring CPU Operation Thi
- Page 363 and 364:
Programme Debugging Messages Commen
- Page 365 and 366:
Requirements «PLC OPERATION» menu
- Page 367 and 368:
18.2.3 Monitor and %TS Task Times P
- Page 369 and 370:
18.2.4 File Management This functio
- Page 371 and 372:
18.2.4.2 Application Directory This
- Page 373 and 374:
18.2.5 Input/Output Configuration T
- Page 375 and 376:
Example Identification of rack 0 an
- Page 377 and 378:
18.2.6.1 Software Backup Actions Se
- Page 379 and 380:
Select the module to be animated us
- Page 381 and 382:
Load a new Ladder module Press «F2
- Page 383 and 384:
Write a Variable Press «F10». ☞
- Page 385 and 386:
19.1 List of Hardware Errors ERR_BU
- Page 387 and 388:
Lists of Functions A Lists of Funct
- Page 389 and 390:
A.1 List by Themes A.1.1 General Pu
- Page 391 and 392:
A.1.6 Interrupt Input Management Li
- Page 393 and 394:
Lists of Functions Function Descrip
- Page 395 and 396:
Symbols %I Organisation 3-15 %INI 2
- Page 397 and 398:
L Label 4-3 Ladder module structure