PPKE ITK PhD and MPhil Thesis Classes
PPKE ITK PhD and MPhil Thesis Classes
PPKE ITK PhD and MPhil Thesis Classes

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
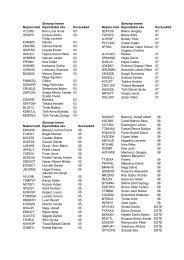
4.5 An Example 101<br />
Input 1 st iteration 5 th iteration 10 th iteration<br />
Figure 4.5: Results after some given iteration steps of the black <strong>and</strong> white skeletonization.<br />
SKELBW1:<br />
⎡<br />
⎤<br />
SKELBW2:<br />
⎡<br />
⎤<br />
1 1 0<br />
2 2 2<br />
B 1 = ⎣ 1 5 −1 ⎦ z 1 = −1 B 2 = ⎣ 0 9 0 ⎦ z 2 = −2<br />
0 −1 0<br />
−1 −2 −1<br />
SKELBW3:<br />
⎡<br />
⎤<br />
SKELBW4:<br />
⎡<br />
⎤<br />
0 1 1<br />
−1 0 2<br />
B 3 = ⎣ −1 5 1 ⎦ z 3 = −1 B 4 = ⎣ −2 9 2 ⎦ z 4 = −2<br />
0 −1 0<br />
−1 0 2<br />
SKELBW5:<br />
⎡<br />
B 5 = ⎣<br />
SKELBW7:<br />
⎡<br />
B 7 = ⎣<br />
0 −1 0<br />
−1 5 1<br />
0 1 1<br />
0 −1 0<br />
1 5 −1<br />
1 1 0<br />
⎤<br />
SKELBW6:<br />
⎡<br />
⎦ z 5 = −1 B 6 = ⎣<br />
⎤<br />
FEEDBACK<br />
⎡<br />
TEMPLATES:<br />
⎤<br />
0 0 0<br />
A n = ⎣ 0 1 0<br />
0 0 0<br />
SKELBW8:<br />
⎡<br />
⎦ z 7 = −1 B 8 = ⎣<br />
⎦ (n = 1...8)<br />
−1 −2 −1<br />
0 9 0<br />
2 2 2<br />
2 0 −1<br />
2 9 −2<br />
2 0 −1<br />
⎤<br />
⎦ z 6 = −2<br />
⎤<br />
⎦ z 8 = −2<br />
where B i denotes the control templates, while A n denotes the feedback matrix<br />
(the same for all directions). The algorithm runs on the SKELBWI.bmp <strong>and</strong> the<br />
size of the image is 128 × 128. The results of the algorithm are plotted below, in<br />
Figure 4.5.<br />
The above analogic CNN algorithm had been implemented on the experimental<br />
system, based on Virtex-II FPGA with high-level software API (collection of<br />
functions), which makes it possible to control the communication of the GAPU


![optika tervezés [Kompatibilitási mód] - Ez itt...](https://img.yumpu.com/45881475/1/190x146/optika-tervezacs-kompatibilitasi-mad-ez-itt.jpg?quality=85)