PPKE ITK PhD and MPhil Thesis Classes
PPKE ITK PhD and MPhil Thesis Classes
PPKE ITK PhD and MPhil Thesis Classes

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.1 Introduction 47<br />
2.50E+07<br />
1.88E+07<br />
1.25E+07<br />
6.25E+06<br />
number of instructions<br />
0E+00<br />
Unroll 0 (A) Unroll 2 (A) Unroll 4 (A) Unroll 8 (A)<br />
Single Cycle<br />
Nop Cycle<br />
Stall due to prefetch miss<br />
Stall due to waiting for hint target<br />
Dual Cycle<br />
Stall due to branch miss<br />
Stall due to dependency<br />
Channel stall cycle<br />
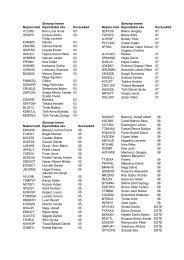
Figure 2.10: Comparison of the instruction number in case of different unrolling<br />
is more than 25% higher in case of using four nonlinearity segments (B) than if<br />
the nonlinearity is partitioned only into two parts (A). The comparison of the instruction<br />
distribution of the upper cases shows that the main difference between<br />
them is the number of required single cycles due to usage of more conditional<br />
structures during the implementation as shown in Figure 2.10. In the four segment<br />
case (B) the number of stall cycles is smaller than in the two segment case<br />
(A) without loop unrolling. By using loop unrolling 30% performance increase<br />
can be achieved.<br />
In nonlinear case the performance can also be improved if multiple SPEs are<br />
used. Finally, we studied the effect of multiple SPEs. In this test case the inner<br />
loop of the computation was rolled out at 8 times, <strong>and</strong> ran on 1, 2, 4 <strong>and</strong> 8 SPEs<br />
in parallel with the nonlinearity partitioned into two (A) <strong>and</strong> four segments (B).<br />
The comparison of the performance of these cases is shown in Figure 2.11.<br />
If the nonlinearity is partitioned into two segments (A) the maximum performance<br />
of the simulation on 1 SPE is about 223 million cell iterations/s, which is


![optika tervezés [Kompatibilitási mód] - Ez itt...](https://img.yumpu.com/45881475/1/190x146/optika-tervezacs-kompatibilitasi-mad-ez-itt.jpg?quality=85)