
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
( 1 + 1) 1<br />
V 1 = I1<br />
R jX + E<br />
(4.8)<br />
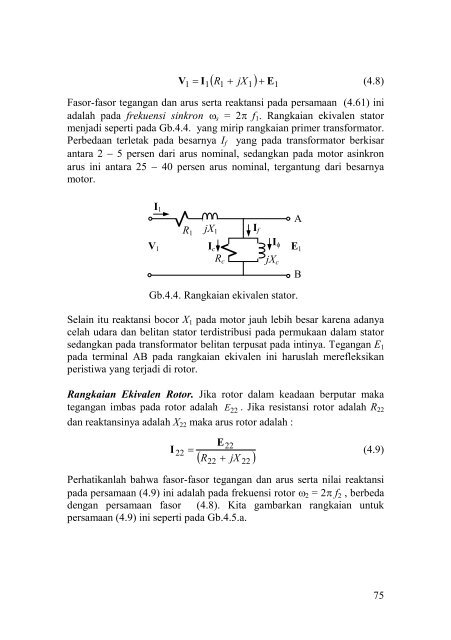
Fasor-fasor tegangan dan arus serta reaktansi pada persamaan (4.61) ini<br />
adalah pada frekuensi sinkron ω s = 2π f 1 . <strong>Rangkaian</strong> ekivalen stator<br />
menjadi seperti pada Gb.4.4. yang mirip rangkaian primer transformator.<br />
Perbedaan terletak pada besarnya I f yang pada transformator berkisar<br />
antara 2 − 5 persen dari arus nominal, sedangkan pada motor asinkron<br />
arus ini antara 25 − 40 persen arus nominal, tergantung dari besarnya<br />
motor.<br />
I 1<br />
I c<br />
R 1<br />
jX 1 I f<br />
I φ<br />
A<br />
V 1<br />
E 1<br />
R c jX c<br />
B<br />
Gb.4.4. <strong>Rangkaian</strong> ekivalen stator.<br />
Selain itu reaktansi bocor X 1 pada motor jauh lebih besar karena adanya<br />
celah udara dan belitan stator terdistribusi pada permukaan dalam stator<br />
sedangkan pada transformator belitan terpusat pada intinya. Tegangan E 1<br />
pada terminal AB pada rangkaian ekivalen ini haruslah merefleksikan<br />
peristiwa yang terjadi di rotor.<br />
<strong>Rangkaian</strong> Ekivalen Rotor. Jika rotor dalam keadaan berputar maka<br />
tegangan imbas pada rotor adalah E 22 . Jika resistansi rotor adalah R 22<br />
dan reaktansinya adalah X 22 maka arus rotor adalah :<br />
E22<br />
I 22 =<br />
(4.9)<br />
( R 22 + jX 22 )<br />
Perhatikanlah bahwa fasor-fasor tegangan dan arus serta nilai reaktansi<br />
pada persamaan (4.9) ini adalah pada frekuensi rotor ω 2 = 2π f 2 , berbeda<br />
dengan persamaan fasor (4.8). Kita gambarkan rangkaian untuk<br />
persamaan (4.9) ini seperti pada Gb.4.5.a.<br />
75