

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 6Setting up parameters<br />
Feed forward gain<br />
[Tune <strong>mode</strong>]<br />
(<strong>position</strong> <strong>mode</strong>)<br />
Function<br />
In the <strong>position</strong> <strong>mode</strong> the HA-655 driver controls the error<br />
count, the difference between [command pulse] and<br />
[feedback pulse], to be [0]. At the beginning of inputting a<br />
command pulse train, the actuator starts slowly because<br />
of a of small error count.<br />
The [feed forward] function may accelerate the actuator as<br />
much as possible, adding the <strong>speed</strong> commands to the<br />
<strong>speed</strong> control loop. The <strong>speed</strong> commands are converted<br />
from a command pulse frequency (feed forward rate =<br />
100%). The feed forward function provides acceleration<br />
control, minimizing the <strong>position</strong> error. The effects of the<br />
feed forward are disabled when the feed forward rate<br />
equals 0%.<br />
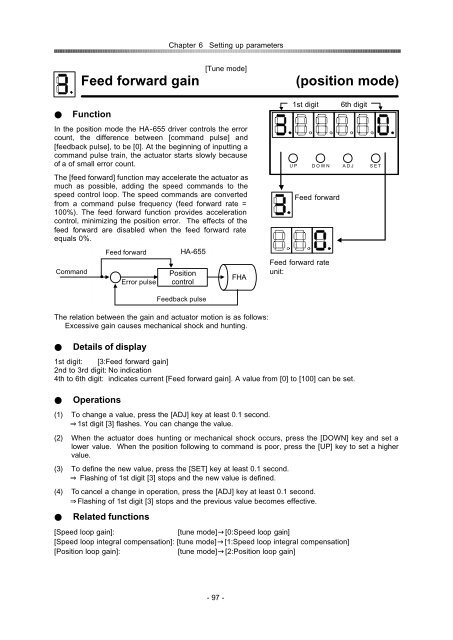
Command<br />
Feed forward<br />
Error pulse<br />
<br />
HA-655<br />
Position<br />
control<br />
Feedback pulse<br />
FHA<br />
1st digit<br />
U P D O W N A D J S E T<br />
Feed forward<br />
Feed forward rate<br />
unit:<br />
6th digit<br />
The relation between the gain and actuator motion is as follows:<br />
Excessive gain causes mechanical shock and hunting.<br />
Details of display<br />
1st digit: [3:Feed forward gain]<br />
2nd to 3rd digit: No indication<br />
4th to 6th digit: indicates current [Feed forward gain]. A value from [0] to [100] can be set.<br />
Operations<br />
(1) To change a value, press the [ADJ] key at least 0.1 second.<br />
1st digit [3] flashes. You can change the value.<br />
(2) When the actuator does hunting or mechanical shock occurs, press the [DOWN] key and set a<br />
lower value. When the <strong>position</strong> following to command is poor, press the [UP] key to set a higher<br />
value.<br />
(3) To define the new value, press the [SET] key at least 0.1 second.<br />
Flashing of 1st digit [3] stops and the new value is defined.<br />
(4) To cancel a change in operation, press the [ADJ] key at least 0.1 second.<br />
Flashing of 1st digit [3] stops and the previous value becomes effective.<br />
Related functions<br />
[Speed loop gain]:<br />
[tune <strong>mode</strong>][0:Speed loop gain]<br />
[Speed loop integral compensation]: [tune <strong>mode</strong>][1:Speed loop integral compensation]<br />
[Position loop gain]:<br />
[tune <strong>mode</strong>][2:Position loop gain]<br />
- 97 -














