

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 5 Operations<br />
5-1-3Tuning servo parameters<br />
After setting the parameters of the [parameter <strong>mode</strong>], couple the actuator with the driven machine; and<br />
you can start tuning the servo parameters.<br />
Usually it is unnecessary to tune the parameters, because these servo parameters have been set to the<br />
proper values for the actuator as standard defaults. Only if the actuator is hunting, overshooting, or<br />
undershooting should you then carefully tune the parameters.<br />
The abstracts of the parameters in [tune <strong>mode</strong>] are described in the table below:<br />
Name Description Parameters<br />
0: Speed loop gain Proportional <strong>speed</strong> loop gain to improve<br />
response to commands<br />
High: better response; too high: hunting<br />
Low: no hunting; too low: overshoot<br />
1: S-loop integral<br />
compensation<br />
Lowering the influence of load torque<br />
fluctuation<br />
High: No hunting; too high: overshoot<br />
Low: better response; too low: hunting<br />
2: Position loop gain Proportional <strong>position</strong> loop gain to improve<br />
response to commands<br />
High: better response; too high: hunting<br />
Low: no hunting; too low: overshoot<br />
3: Feed forward Improving response at acceleration High: better response; too high: hunting<br />
Low: no hunting<br />
4: In-<strong>position</strong> range Allowable error range for <strong>position</strong>ing Integer between 1 and 9999<br />
5:Attained <strong>speed</strong> Speed to turn on HI-SPD(CN2-33 pin) Integer between 1 and 9999<br />
6: Internal <strong>speed</strong><br />
command<br />
Internal <strong>speed</strong> command<br />
1 to <strong>speed</strong> limit ([parameter <strong>mode</strong>][A:<br />
<strong>speed</strong> limit])<br />
7: Acceleration Acceleration time from [o] to <strong>speed</strong> limit 0.0 to 10.0seconds<br />
constant ([parameter <strong>mode</strong>][A: <strong>speed</strong> limit])<br />
8: Deceleration Deceleration time from <strong>speed</strong> limit 0.0 to 10.0seconds<br />
constant ([parameter <strong>mode</strong>][A: <strong>speed</strong> limit]) to [0]<br />
9: Speed command<br />
offset<br />
compensating the slight rotation by<br />
command voltage offset<br />
9999<br />
(26) Shut power OFF for safety.<br />
(27) Couple the actuator with the drive machine.<br />
(28) Turn power ON.<br />
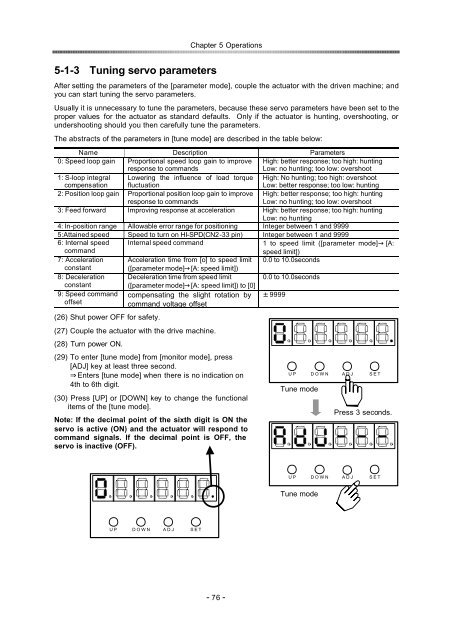
(29) To enter [tune <strong>mode</strong>] from [monitor <strong>mode</strong>], press<br />
[ADJ] key at least three second.<br />
Enters [tune <strong>mode</strong>] when there is no indication on<br />
4th to 6th digit.<br />
(30) Press [UP] or [DOWN] key to change the functional<br />
items of the [tune <strong>mode</strong>].<br />
Note: If the decimal point of the sixth digit is ON the<br />
servo is active (ON) and the actuator will respond to<br />
command signals. If the decimal point is OFF, the<br />
servo is inactive (OFF).<br />
U P D O W N A D J S E T<br />
Tune <strong>mode</strong><br />
Press 3 seconds.<br />
U P<br />
D O W N<br />
A D J<br />
S E T<br />
Tune <strong>mode</strong><br />
U P<br />
D O W N<br />
A D J<br />
S E T<br />
- 76 -














