

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 6Setting up parameters<br />
[Monitor <strong>mode</strong>]<br />
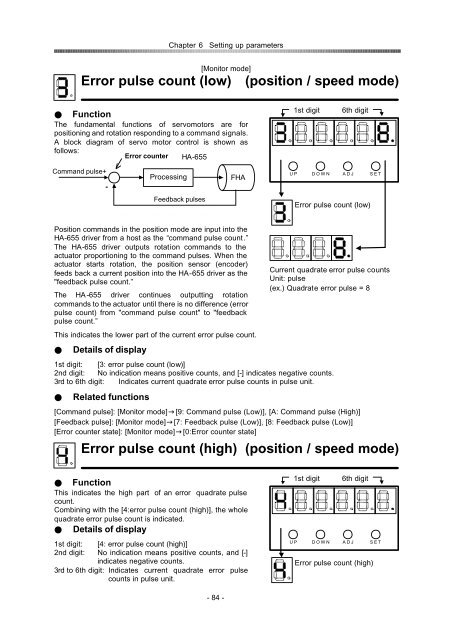
Error pulse count (low) (<strong>position</strong> / <strong>speed</strong> <strong>mode</strong>)<br />
Function<br />
The fundamental functions of servomotors are for<br />
<strong>position</strong>ing and rotation responding to a command signals.<br />
A block diagram of servo motor control is shown as<br />
follows:<br />
Error counter HA-655<br />
1st digit<br />
6th digit<br />
Command pulse+<br />
-<br />
Processing<br />
FHA<br />
U P D O W N A D J S E T<br />
Feedback pulses<br />
Error pulse count (low)<br />
Position commands in the <strong>position</strong> <strong>mode</strong> are input into the<br />
HA-655 driver from a host as the “command pulse count.”<br />
The HA-655 driver outputs rotation commands to the<br />
actuator proportioning to the command pulses. When the<br />
actuator starts rotation, the <strong>position</strong> sensor (encoder)<br />
feeds back a current <strong>position</strong> into the HA-655 driver as the<br />
"feedback pulse count.”<br />
The HA -655 driver continues outputting rotation<br />
commands to the actuator until there is no difference (error<br />
pulse count) from "command pulse count" to "feedback<br />
pulse count.”<br />
This indicates the lower part of the current error pulse count.<br />
Details of display<br />
1st digit: [3: error pulse count (low)]<br />
2nd digit: No indication means positive counts, and [-] indicates negative counts.<br />
3rd to 6th digit: Indicates current quadrate error pulse counts in pulse unit.<br />
Related functions<br />
Current quadrate error pulse counts<br />
Unit: pulse<br />
(ex.) Quadrate error pulse = 8<br />
[Command pulse]: [Monitor <strong>mode</strong>][9: Command pulse (Low)], [A: Command pulse (High)]<br />
[Feedback pulse]: [Monitor <strong>mode</strong>][7: Feedback pulse (Low)], [8: Feedback pulse (Low)]<br />
[Error counter state]: [Monitor <strong>mode</strong>][0:Error counter state]<br />
Error pulse count (high) (<strong>position</strong> / <strong>speed</strong> <strong>mode</strong>)<br />
Function<br />
This indicates the high part of an error quadrate pulse<br />
count.<br />
Combining with the [4:error pulse count (high)], the whole<br />
quadrate error pulse count is indicated.<br />
Details of display<br />
1st digit<br />
6th digit<br />
1st digit: [4: error pulse count (high)]<br />
2nd digit: No indication means positive counts, and [-]<br />
indicates negative counts.<br />
3rd to 6th digit: Indicates current quadrate error pulse<br />
counts in pulse unit.<br />
U P D O W N A D J S E T<br />
Error pulse count (high)<br />
- 84 -














