

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 3I/O ports<br />
3-1-4 I/O port functions in the <strong>position</strong> <strong>mode</strong><br />
This section describes I/O port functions in the <strong>position</strong> <strong>mode</strong>.<br />
CN2-1Input signal common: IN-COM (input)<br />
Function<br />
This is the common port for inputs: [CN2-2, -3, -4, -5, -10, -11]. Supply external power for inputs to this<br />
the port.<br />
Connection<br />
Connect [+24V] external power supply for inputs here.<br />
CN2-2Clear: CLEAR (input)<br />
Function<br />
(1) If alarm exists:<br />
This clears the alarm state, returns to operable state, and clears the error count to [0]. For alarms<br />
that cannot be cleared, shut off the control power once, and turn it on again.<br />
(2) If no alarm exists:<br />
This clears the error count to [0]. At the same time, this clears the command count and the feedback<br />
count.<br />
Connection<br />
Connect [NO-contact signal (a-contact)]. Refer to [CN2-1: input signal common].<br />
CN2-3Servo-ON: S-ON (input)<br />
Function<br />
This turns the servo power for the HA-655 driver ON and OFF.<br />
When the input is ON, the servo power of the HA -655 driver is ON and the actuator can be driven. When<br />
OFF, the servo power turns OFF and the motor is free to rotate.<br />
Connection<br />
Connect [NO-contact signal (a-contact)]. Refer to [CN2-1: input signal common].<br />
CN2-4FWD inhibit: FWD-IH (input)<br />
CN2-5REV inhibit: REV-IH (input)<br />
Function<br />
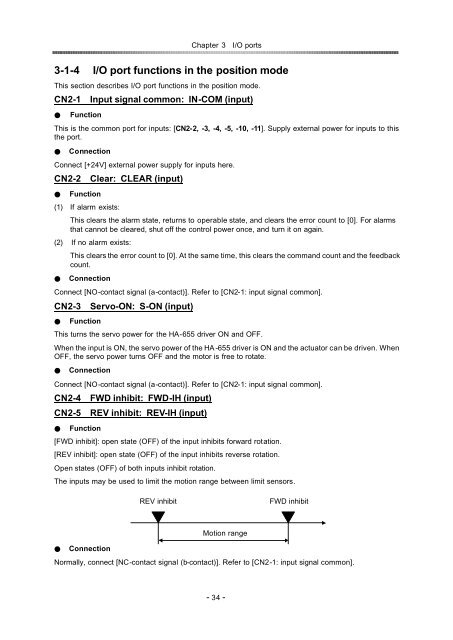
[FWD inhibit]: open state (OFF) of the input inhibits forward rotation.<br />
[REV inhibit]: open state (OFF) of the input inhibits reverse rotation.<br />
Open states (OFF) of both inputs inhibit rotation.<br />
The inputs may be used to limit the motion range between limit sensors.<br />
REV inhibit<br />
FWD inhibit<br />
Motion range<br />
Connection<br />
Normally, connect [NC-contact signal (b-contact)]. Refer to [CN2-1: input signal common].<br />
- 34 -














