

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 6Setting up parameters<br />
6-5-2Functions of the tune <strong>mode</strong><br />
Speed loop gain<br />
(<strong>position</strong> / <strong>speed</strong> <strong>mode</strong>)<br />
Function<br />
The HA -655 drivers make actuators follow command<br />
signals precisely by triple feedback loops of <strong>position</strong>,<br />
<strong>speed</strong>, and current. The [<strong>speed</strong> loop gain] adjusts the<br />
proportional gain of the <strong>speed</strong> feedback loop. The relation<br />
between the gain and actuator motion is as follows:<br />
High gain obtains high servo stiffness and high<br />
response.<br />
Excessive gain makes the servo system<br />
unstable, hunting, and a tendency to<br />
overshoot.<br />
Low gain Inadequate gain makes the servo system<br />
subject to undershooting.<br />
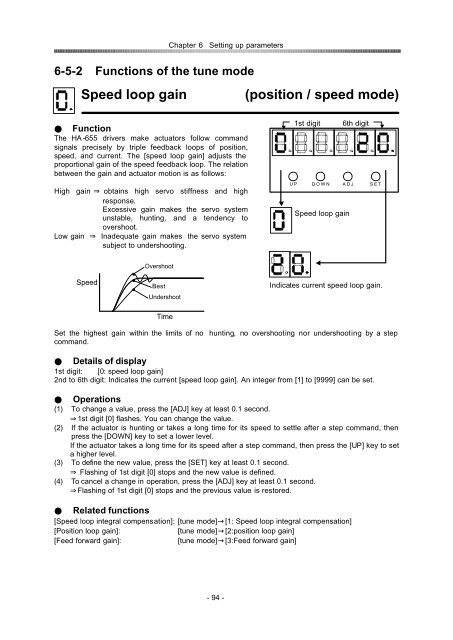
1st digit<br />
U P D O W N A D J S E T<br />
Speed loop gain<br />
6th digit<br />
Speed<br />
Overshoot<br />
Best<br />
Undershoot<br />
Indicates current <strong>speed</strong> loop gain.<br />
Time<br />
Set the highest gain within the limits of no hunting, no overshooting nor undershooting by a step<br />
command.<br />
Details of display<br />
1st digit: [0: <strong>speed</strong> loop gain]<br />
2nd to 6th digit: Indicates the current [<strong>speed</strong> loop gain]. An integer from [1] to [9999] can be set.<br />
Operations<br />
(1) To change a value, press the [ADJ] key at least 0.1 second.<br />
1st digit [0] flashes. You can change the value.<br />
(2) If the actuator is hunting or takes a long time for its <strong>speed</strong> to settle after a step command, then<br />
press the [DOWN] key to set a lower level.<br />
If the actuator takes a long time for its <strong>speed</strong> after a step command, then press the [UP] key to set<br />
a higher level.<br />
(3) To define the new value, press the [SET] key at least 0.1 second.<br />
Flashing of 1st digit [0] stops and the new value is defined.<br />
(4) To cancel a change in operation, press the [ADJ] key at least 0.1 second.<br />
Flashing of 1st digit [0] stops and the previous value is restored.<br />
Related functions<br />
[Speed loop integral compensation]: [tune <strong>mode</strong>][1: Speed loop integral compensation]<br />
[Position loop gain]:<br />
[tune <strong>mode</strong>][2:<strong>position</strong> loop gain]<br />
[Feed forward gain]:<br />
[tune <strong>mode</strong>][3:Feed forward gain]<br />
- 94 -














