

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 2Functions<br />
Chapter 2Functions<br />
2-1Control system of the HA-655 driver<br />
It is said that [plan, do, see] is essential to perform perfect<br />
jobs. In other words, the [plan, do, see] is the repeating<br />
Perfect job cycle<br />
cycle of commandactionresult feedbackmodified<br />
command action feedback . Plan Do See<br />
Driving machines precisely requires the same control as<br />
the above job cycle, that is [Motion commandrun<br />
feedbackmodified command].<br />
Feedback<br />
For example, assume the required motion is rotation to a<br />
target angle and stopping there. To perform the motion,<br />
the motor must be equipped with an angular sensor to<br />
detect a current <strong>position</strong>, and the <strong>position</strong> data must be<br />
compared with the command. If the <strong>position</strong> data is<br />
different than the command, the motor rotates until the<br />
<strong>position</strong> data becomes equal to the command. This is an<br />
example of a <strong>position</strong> servo system.<br />
The <strong>speed</strong> control system is the same. The motor is<br />
equipped with a <strong>speed</strong> sensor and the <strong>speed</strong> is compared<br />
with the <strong>speed</strong> command. If the <strong>speed</strong> is different from the<br />
command, the motor accelerates or decelerates until the<br />
motor <strong>speed</strong> becomes equal to the command. This is an<br />
example of the <strong>speed</strong> servo system.<br />
Precise motion control<br />
Com. Run Result<br />
Feedback<br />
The HA -655 driver realizes above both controls of <strong>position</strong> and <strong>speed</strong> with the same unit.<br />
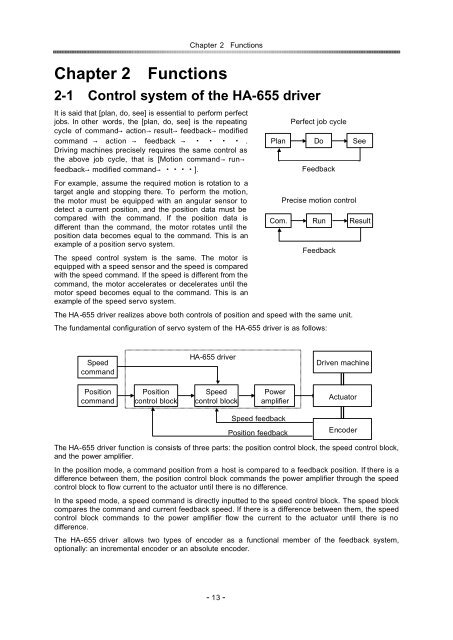
The fundamental configuration of servo system of the HA-655 driver is as follows:<br />
Speed<br />
command<br />
HA-655 driver<br />
<strong>Drive</strong>n machine<br />
Position<br />
command<br />
Position<br />
control block<br />
Speed<br />
control block<br />
Power<br />
amplifier<br />
Actuator<br />
Speed feedback<br />
Position feedback<br />
Encoder<br />
The HA-655 driver function is consists of three parts: the <strong>position</strong> control block, the <strong>speed</strong> control block,<br />
and the power amplifier.<br />
In the <strong>position</strong> <strong>mode</strong>, a command <strong>position</strong> from a host is compared to a feedback <strong>position</strong>. If there is a<br />
difference between them, the <strong>position</strong> control block commands the power amplifier through the <strong>speed</strong><br />
control block to flow current to the actuator until there is no difference.<br />
In the <strong>speed</strong> <strong>mode</strong>, a <strong>speed</strong> command is directly inputted to the <strong>speed</strong> control block. The <strong>speed</strong> block<br />
compares the command and current feedback <strong>speed</strong>. If there is a difference between them, the <strong>speed</strong><br />
control block commands to the power amplifier flow the current to the actuator until there is no<br />
difference.<br />
The HA-655 driver allows two types of encoder as a functional member of the feedback system,<br />
optionally: an incremental encoder or an absolute encoder.<br />
- 13 -














