

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 3I/O ports<br />
CN2-10absolute data request: ABS-REQ(input) *absolute encoder system only<br />
Function<br />
The input is used for a command to output a current resolving count of the encoder.<br />
CN2-11ABS (multi-turn) data clear: ABS-CLEAR(input) *absolute encoder system only<br />
Function<br />
The input uses for a command to clear a current resolving count of the multi-turn counter to zero.<br />
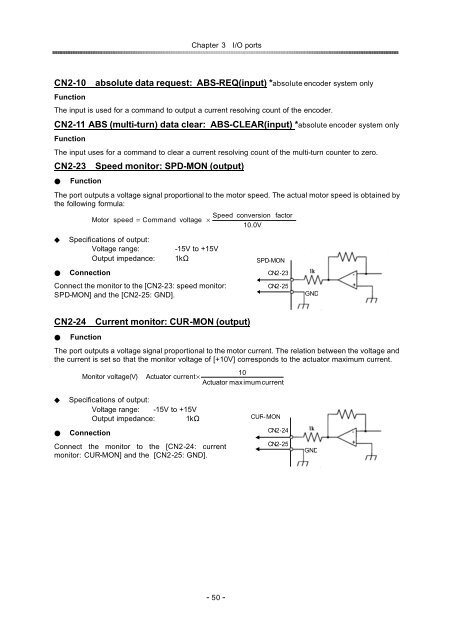
CN2-23Speed monitor: SPD-MON (output)<br />
Function<br />
The port outputs a voltage signal proportional to the motor <strong>speed</strong>. The actual motor <strong>speed</strong> is obtained by<br />
the following formula:<br />
Speed conversion factor<br />
Motor <strong>speed</strong> = Command voltage ×<br />
10.0V<br />
Specifications of output:<br />
Voltage range: -15V to +15V<br />
Output impedance: 1k<br />
Connection<br />
Connect the monitor to the [CN2-23: <strong>speed</strong> monitor:<br />
SPD-MON] and the [CN2-25: GND].<br />
SPD-MON<br />
CN2-23<br />
CN2-25<br />
GND<br />
CN2-24Current monitor: CUR-MON (output)<br />
Function<br />
The port outputs a voltage signal proportional to the motor current. The relation between the voltage and<br />
the current is set so that the monitor voltage of [+10V] corresponds to the actuator maximum current.<br />
Monitor voltage(V) Actuator current×<br />
10<br />
Actuator maximumcurrent<br />
Specifications of output:<br />
Voltage range: -15V to +15V<br />
Output impedance: 1k<br />
Connection<br />
Connect the monitor to the [CN2-24: current<br />
monitor: CUR-MON] and the [CN2-25: GND].<br />
CUR-MON<br />
CN2-24<br />
CN2-25<br />
GND<br />
- 50 -














