

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 2Functions<br />
2-2-4 Absolute encoder signals<br />
u<br />
General descriptions and functions of absolute encoders<br />
The absolute encoder housed in a FHA-C series actuator provides an absolute sensor to generate an<br />
absolute pulse train for a resolvable <strong>position</strong> (the sensor is herein after referred to as “single-turn<br />
encoder”.), and an electronic counter to generate an absolute pulse train for a revolution of the motor<br />
(the counter is hereinafter referred to as “multi-turn counter”.).<br />
An absolute <strong>position</strong> of the encoder is kept in the memory, which is always energized by a combination<br />
of the built-in condenser in the actuator and the backup battery housed in the HA-655 driver.<br />
Please interpret that “single-turn” and “multi-turn” in the manual mean one and plural revolutions of the<br />
encoder (the motor) in an actuator, respectively. Therefore, the actual actuator resolvable <strong>position</strong> of<br />
either “single-turn” or “multi-turn” can be obtained by multiplying an absolute pulse train of the single-turn<br />
encoder and the multi-turn counter by a reduction ratio of the actuator.<br />
u<br />
Single-turn absolute encoder<br />
The single-turn encoder is composed of an encoder disk, an LED light source, and a photo-detector. The<br />
single-turn absolute encoder system outputs a current absolute pulse train combined with an absolute<br />
pulse train of the multi-turn counter in response to the [ABS data request] signal. The resolution of the<br />
encoder is 8192 <strong>position</strong>s per turn (13 bits). To obtain actual resolvable <strong>position</strong> of the actuator, the<br />
absolute pulse train should be multiplied by the reduction ratio of the actuator.<br />
u<br />
Multi-turn counter<br />
The multi-turn counter outputs a current absolute pulse train combined with an absolute pulse train of<br />
the single-turn absolute encoder system in response to the [ABS data request] signal. The allowed<br />
range of the counter is from +4095 to –4096. To obtain an actual resolvable <strong>position</strong> of the actuator, the<br />
absolute pulse train should be multiplied by the reduction ratio of the actuator.<br />
u Energy-saving <strong>mode</strong><br />
In the energy-saving <strong>mode</strong>, even during no power supply for the HA-655 driver, the multi-turn counter<br />
keeps a count in its memory only by the power of a built-in condenser and a built-in battery.<br />
u<br />
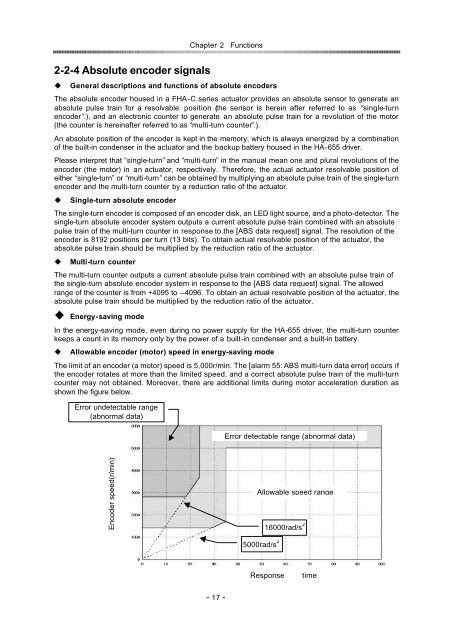
Allowable encoder (motor) <strong>speed</strong> in energy-saving <strong>mode</strong><br />
The limit of an encoder (a motor) <strong>speed</strong> is 5,000r/min. The [alarm 55: ABS multi-turn data error] occurs if<br />
the encoder rotates at more than the limited <strong>speed</strong>, and a correct absolute pulse train of the multi-turn<br />
counter may not obtained. Moreover, there are additional limits during motor acceleration duration as<br />
shown the figure below.<br />
Error undetectable range<br />
(abnormal data)<br />
Error detectable range (abnormal data)<br />
Encoder <strong>speed</strong>(r/min)<br />
Allowable <strong>speed</strong> range<br />
16000rad/s 2<br />
5000rad/s 2<br />
- 17 -<br />
Response<br />
(ms)<br />
time














