

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 2Functions<br />
[Speed control block], [<strong>speed</strong> loop gain], and [<strong>speed</strong> loop integral compensation]<br />
(1) The first function of the [<strong>speed</strong> control block] is to subtract a feedback signal from a command<br />
signal.<br />
(2) The second function is the block converts the difference to a [current command] multiplies it by a<br />
factor, and then transmits the [current command (I)] to the [power amplifier]. The factor (Kv) is<br />
called [<strong>speed</strong> loop gain].<br />
It is clear in the formula that a significant [<strong>speed</strong> difference] is converted into a high [current<br />
command] and zero difference into zero current command, in other words, a stop command.<br />
(3) Just as with the [<strong>position</strong> loop gain], higher gain provides better response and excessive gain<br />
results in hunting. Low gain requires no hunting but raises the occurrence of undershoots.<br />
(4) The [<strong>speed</strong> loop integral compensation (Tv)] of The HA -655 driver makes less influence on load<br />
fluctuation.<br />
⎛ 1 ⎞<br />
IKv<br />
× ⎜1 +<br />
⎟ × <strong>speed</strong> difference<br />
⎝ Tv S ⎠<br />
If the [<strong>speed</strong> loop integral compensation (Tv)] is smaller, the <strong>speed</strong> response to the load fluctuation<br />
becomes better, but too small a value results in hunting. Excessive compensation requires no<br />
hunting, but will result in a poor response for load fluctuation.<br />
Tuning method<br />
[Tune <strong>mode</strong>][0.<strong>speed</strong> loop gain], and [1: <strong>speed</strong> loop integral compensation]<br />
Feed forward gain<br />
I Kv ×<strong>speed</strong>difference<br />
(1) In the <strong>position</strong> <strong>mode</strong> The HA-655 driver controls the error count, (the difference between<br />
[command pulse] and [feedback pulse]), to be [0]. At the beginning of inputting a command pulse<br />
train, the actuator starts slowly because of small error count.<br />
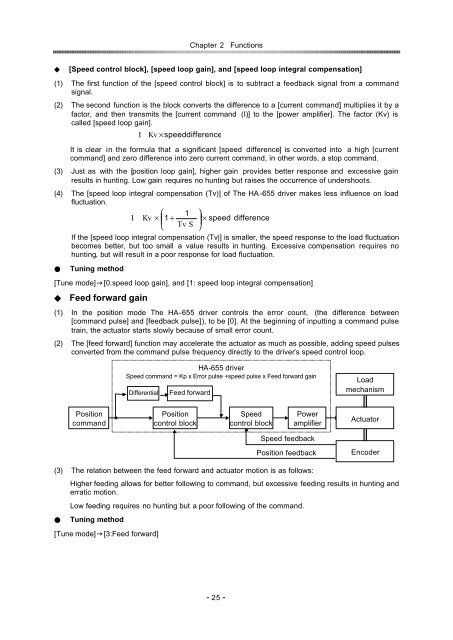
(2) The [feed forward] function may accelerate the actuator as much as possible, adding <strong>speed</strong> pulses<br />
converted from the command pulse frequency directly to the driver’s <strong>speed</strong> control loop.<br />
HA-655 driver<br />
Speed command = Kp x Error pulse +<strong>speed</strong> pulse x Feed forward gain<br />
Differential<br />
Feed forward<br />
Load<br />
mechanism<br />
Position<br />
command<br />
Position<br />
control block<br />
Speed<br />
control block<br />
Power<br />
amplifier<br />
Actuator<br />
Speed feedback<br />
Position feedback<br />
Encoder<br />
(3) The relation between the feed forward and actuator motion is as follows:<br />
Higher feeding allows for better following to command, but excessive feeding results in hunting and<br />
erratic motion.<br />
Low feeding requires no hunting but a poor following of the command.<br />
Tuning method<br />
[Tune <strong>mode</strong>][3:Feed forward]<br />
- 25 -














