

position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC
position / speed mode - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
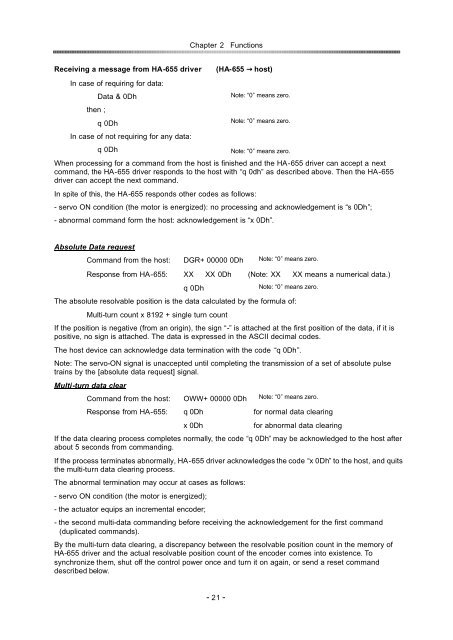
Chapter 2Functions<br />
Receiving a message from HA-655 driver<br />
In case of requiring for data:<br />
then ;<br />
Data & 0Dh<br />
q 0Dh<br />
In case of not requiring for any data:<br />
q 0Dh<br />
(HA-655 host)<br />
When processing for a command from the host is finished and the HA-655 driver can accept a next<br />
command, the HA-655 driver responds to the host with “q 0dh” as described above. Then the HA-655<br />
driver can accept the next command.<br />
In spite of this, the HA-655 responds other codes as follows:<br />
Note: “0” means zero.<br />
Note: “0” means zero.<br />
Note: “0” means zero.<br />
- servo ON condition (the motor is energized): no processing and acknowledgement is “s 0Dh”;<br />
- abnormal command form the host: acknowledgement is “x 0Dh”.<br />
Absolute Data request<br />
Command from the host:<br />
Response from HA-655:<br />
DGR+ 00000 0Dh<br />
XX<br />
0Dh<br />
q 0Dh<br />
The absolute resolvable <strong>position</strong> is the data calculated by the formula of:<br />
Multi-turn count x 8192 + single turn count<br />
(Note: XX<br />
means a numerical data.)<br />
If the <strong>position</strong> is negative (from an origin), the sign “-” is attached at the first <strong>position</strong> of the data, if it is<br />
positive, no sign is attached. The data is expressed in the ASCII decimal codes.<br />
The host device can acknowledge data termination with the code “q 0Dh”.<br />
Note: The servo-ON signal is unaccepted until completing the transmission of a set of absolute pulse<br />
trains by the [absolute data request] signal.<br />
Multi-turn data clear<br />
Command from the host:<br />
OWW+ 00000 0Dh<br />
Response from HA-655: q 0Dh for normal data clearing<br />
x 0Dh<br />
for abnormal data clearing<br />
If the data clearing process completes normally, the code “q 0Dh” may be acknowledged to the host after<br />
about 5 seconds from commanding.<br />
If the process terminates abnormally, HA-655 driver acknowledges the code “x 0Dh” to the host, and quits<br />
the multi-turn data clearing process.<br />
The abnormal termination may occur at cases as follows:<br />
- servo ON condition (the motor is energized);<br />
- the actuator equips an incremental encoder;<br />
Note: “0” means zero.<br />
Note: “0” means zero.<br />
Note: “0” means zero.<br />
- the second multi-data commanding before receiving the acknowledgement for the first command<br />
(duplicated commands).<br />
By the multi-turn data clearing, a discrepancy between the resolvable <strong>position</strong> count in the memory of<br />
HA-655 driver and the actual resolvable <strong>position</strong> count of the encoder comes into existence. To<br />
synchronize them, shut off the control power once and turn it on again, or send a reset command<br />
described below.<br />
- 21 -














