3 Stetige Regler - JUMO
3 Stetige Regler - JUMO
3 Stetige Regler - JUMO

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
7 Sonderfunktionen von <strong>Regler</strong>n<br />
Stellgrad y<br />
y-Ruhe (45%)<br />
Istwert x [°C]<br />
200<br />
(1)<br />
Start<br />
Sprunghöhe<br />
20% {<br />
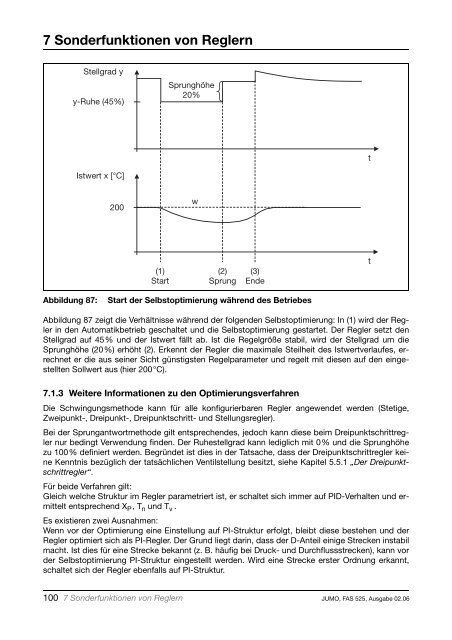
Abbildung 87: Start der Selbstoptimierung während des Betriebes<br />
Abbildung 87 zeigt die Verhältnisse während der folgenden Selbstoptimierung: In (1) wird der <strong>Regler</strong><br />
in den Automatikbetrieb geschaltet und die Selbstoptimierung gestartet. Der <strong>Regler</strong> setzt den<br />
Stellgrad auf 45% und der Istwert fällt ab. Ist die Regelgröße stabil, wird der Stellgrad um die<br />
Sprunghöhe (20%) erhöht (2). Erkennt der <strong>Regler</strong> die maximale Steilheit des Istwertverlaufes, errechnet<br />
er die aus seiner Sicht günstigsten Regelparameter und regelt mit diesen auf den eingestellten<br />
Sollwert aus (hier 200°C).<br />
7.1.3 Weitere Informationen zu den Optimierungsverfahren<br />
w<br />
(2)<br />
Sprung<br />
(3)<br />
Ende<br />
Die Schwingungsmethode kann für alle konfigurierbaren <strong>Regler</strong> angewendet werden (<strong>Stetige</strong>,<br />
Zweipunkt-, Dreipunkt-, Dreipunktschritt- und Stellungsregler).<br />
Bei der Sprungantwortmethode gilt entsprechendes, jedoch kann diese beim Dreipunktschrittregler<br />
nur bedingt Verwendung finden. Der Ruhestellgrad kann lediglich mit 0% und die Sprunghöhe<br />
zu 100% definiert werden. Begründet ist dies in der Tatsache, dass der Dreipunktschrittregler keine<br />
Kenntnis bezüglich der tatsächlichen Ventilstellung besitzt, siehe Kapitel 5.5.1 „Der Dreipunktschrittregler“.<br />
Für beide Verfahren gilt:<br />
Gleich welche Struktur im <strong>Regler</strong> parametriert ist, er schaltet sich immer auf PID-Verhalten und ermittelt<br />
entsprechend XP , Tn und Tv .<br />
Es existieren zwei Ausnahmen:<br />
Wenn vor der Optimierung eine Einstellung auf PI-Struktur erfolgt, bleibt diese bestehen und der<br />
<strong>Regler</strong> optimiert sich als PI-<strong>Regler</strong>. Der Grund liegt darin, dass der D-Anteil einige Strecken instabil<br />
macht. Ist dies für eine Strecke bekannt (z. B. häufig bei Druck- und Durchflussstrecken), kann vor<br />
der Selbstoptimierung PI-Struktur eingestellt werden. Wird eine Strecke erster Ordnung erkannt,<br />
schaltet sich der <strong>Regler</strong> ebenfalls auf PI-Struktur.<br />
100 7 Sonderfunktionen von <strong>Regler</strong>n <strong>JUMO</strong>, FAS 525, Ausgabe 02.06<br />
t<br />
t