3 Stetige Regler - JUMO
3 Stetige Regler - JUMO
3 Stetige Regler - JUMO

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>JUMO</strong>, FAS 525, Ausgabe 02.06<br />
3 <strong>Stetige</strong> <strong>Regler</strong><br />
Die Regelparameter haben unterschiedliche Auswirkungen auf die einzelnen Anteile:<br />
Größeres XP entspricht kleinerem P-Anteil<br />
r kleinere Verstärkung: dadurch stabileres, jedoch auch trägeres Verhalten<br />
Größeres Tn entspricht kleinerem I-Anteil<br />
r integriert langsamer auf: dadurch stabileres, jedoch auch trägeres Verhalten<br />
Größeres Tv entspricht größerem D-Anteil<br />
r wirkt der Änderung des Istwertes stärker entgegen, dadurch stabileres Verhalten,<br />
Tv nicht zu groß wählen<br />
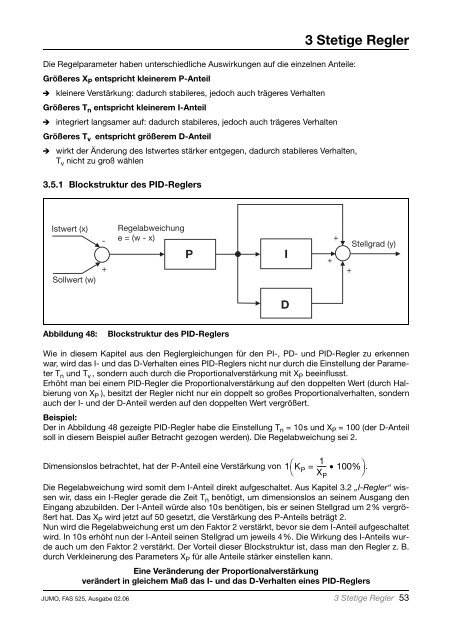
3.5.1 Blockstruktur des PID-<strong>Regler</strong>s<br />
Istwert (x) Regelabweichung<br />
- e = (w - x)<br />
Sollwert (w)<br />
+<br />
Abbildung 48: Blockstruktur des PID-<strong>Regler</strong>s<br />
P<br />
Wie in diesem Kapitel aus den <strong>Regler</strong>gleichungen für den PI-, PD- und PID-<strong>Regler</strong> zu erkennen<br />
war, wird das I- und das D-Verhalten eines PID-<strong>Regler</strong>s nicht nur durch die Einstellung der Parameter<br />
Tn und Tv , sondern auch durch die Proportionalverstärkung mit XP beeinflusst.<br />
Erhöht man bei einem PID-<strong>Regler</strong> die Proportionalverstärkung auf den doppelten Wert (durch Halbierung<br />
von XP ), besitzt der <strong>Regler</strong> nicht nur ein doppelt so großes Proportionalverhalten, sondern<br />
auch der I- und der D-Anteil werden auf den doppelten Wert vergrößert.<br />
Beispiel:<br />
Der in Abbildung 48 gezeigte PID-<strong>Regler</strong> habe die Einstellung Tn = 10s und XP = 100 (der D-Anteil<br />
soll in diesem Beispiel außer Betracht gezogen werden). Die Regelabweichung sei 2.<br />
Dimensionslos betrachtet, hat der P-Anteil eine Verstärkung von 1⎛ 1<br />
KP= ------ • 100% ⎞.<br />
⎝ X ⎠<br />
P<br />
.<br />
Die Regelabweichung wird somit dem I-Anteil direkt aufgeschaltet. Aus Kapitel 3.2 „I-<strong>Regler</strong>“ wissen<br />
wir, dass ein I-<strong>Regler</strong> gerade die Zeit Tn benötigt, um dimensionslos an seinem Ausgang den<br />
Eingang abzubilden. Der I-Anteil würde also 10s benötigen, bis er seinen Stellgrad um 2% vergrößert<br />
hat. Das XP wird jetzt auf 50 gesetzt, die Verstärkung des P-Anteils beträgt 2.<br />
Nun wird die Regelabweichung erst um den Faktor 2 verstärkt, bevor sie dem I-Anteil aufgeschaltet<br />
wird. In 10s erhöht nun der I-Anteil seinen Stellgrad um jeweils 4%. Die Wirkung des I-Anteils wurde<br />
auch um den Faktor 2 verstärkt. Der Vorteil dieser Blockstruktur ist, dass man den <strong>Regler</strong> z. B.<br />
durch Verkleinerung des Parameters XP für alle Anteile stärker einstellen kann.<br />
Eine Veränderung der Proportionalverstärkung<br />
verändert in gleichem Maß das I- und das D-Verhalten eines PID-<strong>Regler</strong>s<br />
I<br />
D<br />
+<br />
+<br />
+<br />
Stellgrad (y)<br />
3 <strong>Stetige</strong> <strong>Regler</strong> 53