3 Stetige Regler - JUMO
3 Stetige Regler - JUMO
3 Stetige Regler - JUMO

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3 <strong>Stetige</strong> <strong>Regler</strong><br />
3.5 PID-<strong>Regler</strong><br />
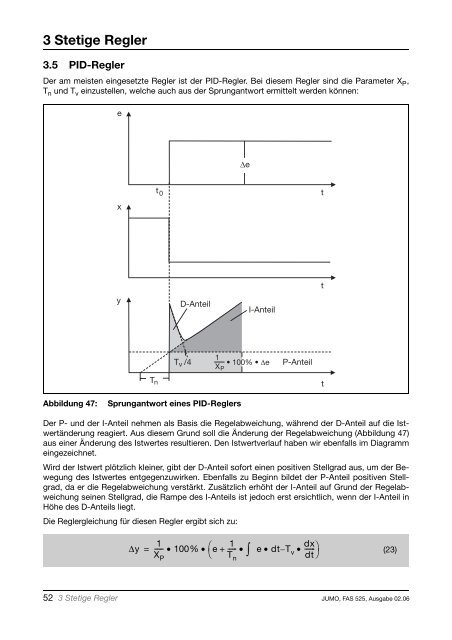
Der am meisten eingesetzte <strong>Regler</strong> ist der PID-<strong>Regler</strong>. Bei diesem <strong>Regler</strong> sind die Parameter X P ,<br />
T n und T v einzustellen, welche auch aus der Sprungantwort ermittelt werden können:<br />
e<br />
x<br />
y<br />
D-Anteil<br />
Abbildung 47: Sprungantwort eines PID-<strong>Regler</strong>s<br />
T<br />
t<br />
n<br />
0<br />
T v /4<br />
1<br />
X<br />
P<br />
I-Anteil<br />
P-Anteil<br />
Der P- und der I-Anteil nehmen als Basis die Regelabweichung, während der D-Anteil auf die Istwertänderung<br />
reagiert. Aus diesem Grund soll die Änderung der Regelabweichung (Abbildung 47)<br />
aus einer Änderung des Istwertes resultieren. Den Istwertverlauf haben wir ebenfalls im Diagramm<br />
eingezeichnet.<br />
Wird der Istwert plötzlich kleiner, gibt der D-Anteil sofort einen positiven Stellgrad aus, um der Bewegung<br />
des Istwertes entgegenzuwirken. Ebenfalls zu Beginn bildet der P-Anteil positiven Stellgrad,<br />
da er die Regelabweichung verstärkt. Zusätzlich erhöht der I-Anteil auf Grund der Regelabweichung<br />
seinen Stellgrad, die Rampe des I-Anteils ist jedoch erst ersichtlich, wenn der I-Anteil in<br />
Höhe des D-Anteils liegt.<br />
Die <strong>Regler</strong>gleichung für diesen <strong>Regler</strong> ergibt sich zu:<br />
52 3 <strong>Stetige</strong> <strong>Regler</strong> <strong>JUMO</strong>, FAS 525, Ausgabe 02.06<br />
De<br />
1<br />
Δy ------<br />
1<br />
• 100% e ----dx<br />
= • ⎛ + • ∫ e • dt–<br />
T ------<br />
⎝ v • ⎞<br />
dt⎠<br />
(23)<br />
X P<br />
T n<br />
t<br />
t<br />
t