3 Stetige Regler - JUMO
3 Stetige Regler - JUMO
3 Stetige Regler - JUMO

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
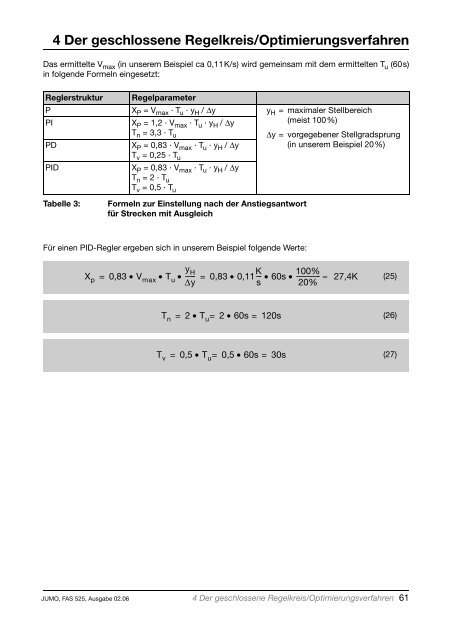
4 Der geschlossene Regelkreis/Optimierungsverfahren<br />
Das ermittelte V max (in unserem Beispiel ca 0,11K/s) wird gemeinsam mit dem ermittelten T u (60s)<br />
in folgende Formeln eingesetzt:<br />
<strong>Regler</strong>struktur Regelparameter<br />
P<br />
PI<br />
XP = Vmax · Tu · yH / Δy<br />
XP = 1,2 · Vmax · Tu · yH / Δy<br />
Tn = 3,3 · Tu yH = maximaler Stellbereich<br />
(meist 100%)<br />
Δy = vorgegebener Stellgradsprung<br />
PD XP = 0,83 · Vmax · Tu · yH / Δy<br />
Tv = 0,25 · Tu (in unserem Beispiel 20%)<br />
PID XP = 0,83 · Vmax · Tu · yH / Δy<br />
Tn = 2 · Tu Tv = 0,5 · Tu Tabelle 3: Formeln zur Einstellung nach der Anstiegsantwort<br />
für Strecken mit Ausgleich<br />
Für einen PID-<strong>Regler</strong> ergeben sich in unserem Beispiel folgende Werte:<br />
Xp 0,83 • Vmax • T ------ u • 0,83 0,11<br />
Δy<br />
K<br />
--- 60s<br />
s<br />
100%<br />
= = • • • --------------- ≈ 27,4K (25)<br />
20%<br />
<strong>JUMO</strong>, FAS 525, Ausgabe 02.06<br />
y H<br />
Tn = 2•Tu= 2•60s = 120s<br />
(26)<br />
Tv = 0,5 • Tu= 0,5 • 60s = 30s<br />
(27)<br />
4 Der geschlossene Regelkreis/Optimierungsverfahren 61