3 Stetige Regler - JUMO
3 Stetige Regler - JUMO
3 Stetige Regler - JUMO

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4 Der geschlossene Regelkreis/Optimierungsverfahren<br />
Der geschlossene Regelkreis/Optimierungsverfahren<br />
In diesem Kapitel lernen Sie, wie in einem Regelkreis Führungs- und Störverhalten definiert sind<br />
und die Regelparameter für ein stabiles Regelverhalten eingestellt werden.<br />
Die weiterhin vorgestellten Optimierungsverfahren sind eine Hilfe bei der Ermittlung von geeigneten<br />
Parametern für den <strong>Regler</strong>. Abschließend nennen wir die <strong>Regler</strong>strukturen, welche im Fall von unterschiedlichen<br />
Regelgrößen zum Einsatz kommen.<br />
4.1 Führungsverhalten/Störverhalten<br />
w/x<br />
(1)<br />
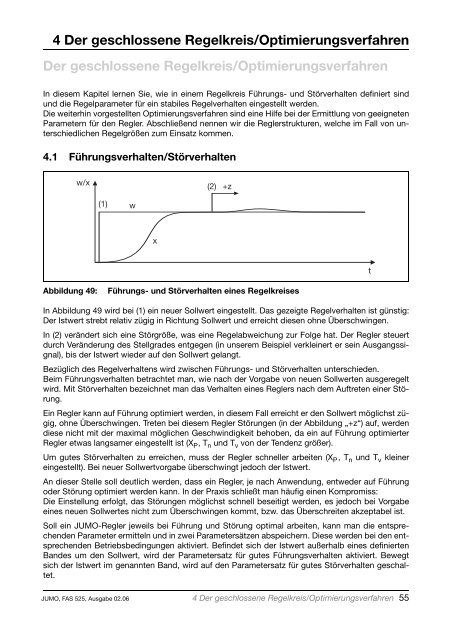
Abbildung 49: Führungs- und Störverhalten eines Regelkreises<br />
In Abbildung 49 wird bei (1) ein neuer Sollwert eingestellt. Das gezeigte Regelverhalten ist günstig:<br />
Der Istwert strebt relativ zügig in Richtung Sollwert und erreicht diesen ohne Überschwingen.<br />
In (2) verändert sich eine Störgröße, was eine Regelabweichung zur Folge hat. Der <strong>Regler</strong> steuert<br />
durch Veränderung des Stellgrades entgegen (in unserem Beispiel verkleinert er sein Ausgangssignal),<br />
bis der Istwert wieder auf den Sollwert gelangt.<br />
Bezüglich des Regelverhaltens wird zwischen Führungs- und Störverhalten unterschieden.<br />
Beim Führungsverhalten betrachtet man, wie nach der Vorgabe von neuen Sollwerten ausgeregelt<br />
wird. Mit Störverhalten bezeichnet man das Verhalten eines <strong>Regler</strong>s nach dem Auftreten einer Störung.<br />
Ein <strong>Regler</strong> kann auf Führung optimiert werden, in diesem Fall erreicht er den Sollwert möglichst zügig,<br />
ohne Überschwingen. Treten bei diesem <strong>Regler</strong> Störungen (in der Abbildung „+z“) auf, werden<br />
diese nicht mit der maximal möglichen Geschwindigkeit behoben, da ein auf Führung optimierter<br />
<strong>Regler</strong> etwas langsamer eingestellt ist (XP , Tn und Tv von der Tendenz größer).<br />
Um gutes Störverhalten zu erreichen, muss der <strong>Regler</strong> schneller arbeiten (XP , Tn und Tv kleiner<br />
eingestellt). Bei neuer Sollwertvorgabe überschwingt jedoch der Istwert.<br />
An dieser Stelle soll deutlich werden, dass ein <strong>Regler</strong>, je nach Anwendung, entweder auf Führung<br />
oder Störung optimiert werden kann. In der Praxis schließt man häufig einen Kompromiss:<br />
Die Einstellung erfolgt, das Störungen möglichst schnell beseitigt werden, es jedoch bei Vorgabe<br />
eines neuen Sollwertes nicht zum Überschwingen kommt, bzw. das Überschreiten akzeptabel ist.<br />
Soll ein <strong>JUMO</strong>-<strong>Regler</strong> jeweils bei Führung und Störung optimal arbeiten, kann man die entsprechenden<br />
Parameter ermitteln und in zwei Parametersätzen abspeichern. Diese werden bei den entsprechenden<br />
Betriebsbedingungen aktiviert. Befindet sich der Istwert außerhalb eines definierten<br />
Bandes um den Sollwert, wird der Parametersatz für gutes Führungsverhalten aktiviert. Bewegt<br />
sich der Istwert im genannten Band, wird auf den Parametersatz für gutes Störverhalten geschaltet.<br />
<strong>JUMO</strong>, FAS 525, Ausgabe 02.06<br />
w<br />
x<br />
(2)<br />
+z<br />
4 Der geschlossene Regelkreis/Optimierungsverfahren 55<br />
t