antriebstechnik 6/2016
antriebstechnik 6/2016
antriebstechnik 6/2016
- TAGS
- antriebstechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
SPECIAL I AUTOMATION UND ROBOTIK<br />
men Schwingungen, feuchten Um ge bungsb<br />
edingungen und extremen Temperaturen<br />
ausgesetzt ist. Außerdem müssen die empfindlichen<br />
Kommunikationsdaten über die<br />
Schleifringe schnell, exakt und fehlerfrei<br />
übertragen werden. Häufig erfordert dies<br />
einen mehrwöchigen Einsatz erfahrenen<br />
Fachpersonals und ist mit einem erheblichen<br />
Zeitaufwand verbunden.<br />
Software erleichtert<br />
Implementierung<br />
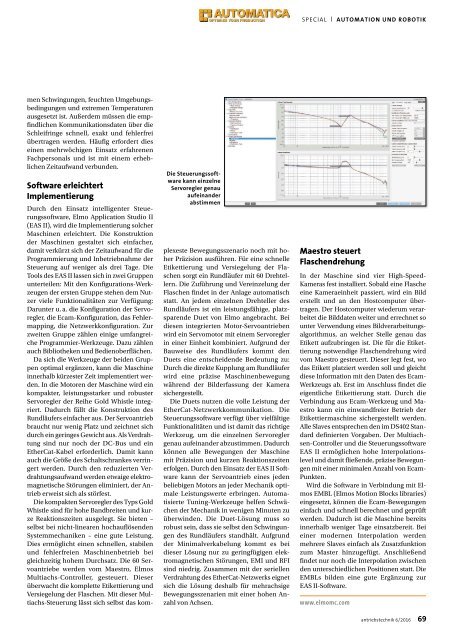
Die Steuerungssoftware<br />
kann einzelne<br />
Servoregler genau<br />
aufeinander<br />
abstimmen<br />
Durch den Einsatz intelligenter Steuerungssoftware,<br />
Elmo Application Studio II<br />
(EAS II), wird die Implementierung solcher<br />
Maschi nen erleichtert. Die Konstruktion<br />
der Maschinen gestaltet sich einfacher,<br />
damit verkürzt sich der Zeitaufwand für die<br />
Programmierung und Inbetriebnahme der<br />
Steuerung auf weniger als drei Tage. Die<br />
Tools des EAS II lassen sich in zwei Gruppen<br />
unterteilen: Mit den Konfigurations-Werkzeugen<br />
der ersten Gruppe stehen dem Nutzer<br />
viele Funktionalitäten zur Verfügung:<br />
Darunter u. a. die Konfiguration der Servoregler,<br />
die Ecam-Konfiguration, das Fehlermapping,<br />
die Netzwerkkonfiguration. Zur<br />
zweiten Gruppe zählen einige umfangreiche<br />
Programmier-Werkzeuge. Dazu zählen<br />
auch Bibliotheken und Bedienoberflächen.<br />
Da sich die Werkzeuge der beiden Gruppen<br />
optimal ergänzen, kann die Maschine<br />
innerhalb kürzester Zeit implementiert werden.<br />
In die Motoren der Maschine wird ein<br />
kompakter, leistungsstarker und robuster<br />
Servoregler der Reihe Gold Whistle integriert.<br />
Dadurch fällt die Konstruktion des<br />
Rundläufers einfacher aus. Der Servoantrieb<br />
braucht nur wenig Platz und zeichnet sich<br />
durch ein geringes Gewicht aus. Als Verdrahtung<br />
sind nur noch der DC-Bus und ein<br />
EtherCat-Kabel erforderlich. Damit kann<br />
auch die Größe des Schaltschrankes verringert<br />
werden. Durch den reduzierten Verdrahtungsaufwand<br />
werden etwaige elektromagnetische<br />
Störungen eliminiert, der Antrieb<br />
erweist sich als störfest.<br />
Die kompakten Servoregler des Typs Gold<br />
Whistle sind für hohe Bandbreiten und kurze<br />
Reaktionszeiten ausgelegt. Sie bieten –<br />
selbst bei nicht-linearen hochauflösenden<br />
Systemmechaniken – eine gute Leistung.<br />
Dies ermöglicht einen schnellen, stabilen<br />
und fehlerfreien Maschinenbetrieb bei<br />
gleichzeitig hohem Durchsatz. Die 60 Servo<br />
antriebe werden vom Maestro, Elmos<br />
Multiachs-Controller, gesteuert. Dieser<br />
überwacht die komplette Etikettierung und<br />
Versiegelung der Flaschen. Mit dieser Multiachs-Steuerung<br />
lässt sich selbst das komplexeste<br />
Bewegungsszenario noch mit hoher<br />
Präzision ausführen. Für eine schnelle<br />
Etikettierung und Versiegelung der Flaschen<br />
sorgt ein Rundläufer mit 60 Drehtellern.<br />
Die Zuführung und Vereinzelung der<br />
Flaschen findet in der Anlage automatisch<br />
statt. An jedem einzelnen Drehteller des<br />
Rundläufers ist ein leistungsfähige, platzsparende<br />
Duet von Elmo angebracht. Bei<br />
diesen integrierten Motor-Servoantrieben<br />
wird ein Servomotor mit einem Servoregler<br />
in einer Einheit kombiniert. Aufgrund der<br />
Bauweise des Rund läufers kommt den<br />
Duets eine entschei dende Bedeutung zu:<br />
Durch die direkte Kupplung am Rundläufer<br />
wird eine präzise Maschinen bewegung<br />
während der Bilderfassung der Kamera<br />
sichergestellt.<br />
Die Duets nutzen die volle Leistung der<br />
EtherCat-Netzwerkkommunikation. Die<br />
Steuerungssoftware verfügt über vielfältige<br />
Funktionalitäten und ist damit das richtige<br />
Werkzeug, um die einzelnen Servoregler<br />
genau aufeinander abzustimmen. Dadurch<br />
können alle Bewegungen der Maschine<br />
mit Präzision und kurzen Reaktionszeiten<br />
erfolgen. Durch den Einsatz der EAS II Software<br />
kann der Servoantrieb eines jeden<br />
beliebigen Motors an jeder Mechanik optimale<br />
Leistungswerte erbringen. Automatisierte<br />
Tuning-Werkzeuge helfen Schwächen<br />
der Mechanik in wenigen Minuten zu<br />
überwinden. Die Duet-Lösung muss so<br />
robust sein, dass sie selbst den Schwingungen<br />
des Rundläufers standhält. Aufgrund<br />
der Minimalverkabelung kommt es bei<br />
dieser Lösung nur zu geringfügigen elektromagnetischen<br />
Störungen, EMI und RFI<br />
sind niedrig. Zusammen mit der seriellen<br />
Verdrahtung des EtherCat-Netzwerks eignet<br />
sich die Lösung deshalb für mehrachsige<br />
Bewegungsszenarien mit einer hohen Anzahl<br />
von Achsen.<br />
Maestro steuert<br />
Flaschendrehung<br />
In der Maschine sind vier High-Speed<br />
Kameras fest installiert. Sobald eine Flasche<br />
eine Kameraeinheit passiert, wird ein Bild<br />
erstellt und an den Hostcomputer übertragen.<br />
Der Hostcomputer wiederum verarbeitet<br />
die Bilddaten weiter und errechnet so<br />
unter Verwendung eines Bildverarbeitungsalgorithmus,<br />
an welcher Stelle genau das<br />
Etikett aufzubringen ist. Die für die Etikettierung<br />
notwendige Flaschendrehung wird<br />
vom Maestro gesteuert. Dieser legt fest, wo<br />
das Etikett platziert werden soll und gleicht<br />
diese Information mit den Daten des Ecam-<br />
Werkzeugs ab. Erst im Anschluss findet die<br />
eigentliche Etikettierung statt. Durch die<br />
Verbindung aus Ecam-Werkzeug und Maestro<br />
kann ein einwandfreier Betrieb der<br />
Etiket tiermaschine sichergestellt werden.<br />
Alle Slaves entsprechen den im DS402 Standard<br />
definierten Vorgaben. Der Multiachsen-Controller<br />
und die Steuerungssoftware<br />
EAS II ermöglichen hohe Interpolationslevel<br />
und damit fließende, präzise Bewegungen<br />
mit einer minimalen Anzahl von Ecam-<br />
Punkten.<br />
Wird die Software in Verbindung mit Elmos<br />
EMBL (Elmos Motion Blocks libraries)<br />
eingesetzt, können die Ecam-Bewegungen<br />
einfach und schnell berechnet und geprüft<br />
werden. Dadurch ist die Maschine bereits<br />
innerhalb weniger Tage einsatzbereit. Bei<br />
einer modernen Interpolation werden<br />
mehrere Slaves einfach als Zusatzfunktion<br />
zum Master hinzugefügt. Anschließend<br />
findet nur noch die Interpolation zwischen<br />
den unterschiedlichen Positionen statt. Die<br />
EMBLs bilden eine gute Ergänzung zur<br />
EAS II-Software.<br />
www.elmomc.com<br />
<strong>antriebstechnik</strong> 6/<strong>2016</strong> 69