Image Guided Surgery - Technische Universität Dresden
Image Guided Surgery - Technische Universität Dresden
Image Guided Surgery - Technische Universität Dresden

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1.4.1 Elektromechanische Verfahren<br />
Die elektromechanischen Systeme, die einen beweglichen Gelenkarm zur Orientierung<br />
im Raum nutzen, wie z.B. die Viewing Wand, sind nur noch gelegentlich im klini-<br />
schen Einsatz. Die Viewing Wand arbeitet auf Grundlage eines in allen räumlichen<br />
Ebenen frei zu bewegenden, ausbalancierten mechanischen Armes. Diese Viel-<br />
gelenkarme verfolgen die Lage der Instrumente durch einen direkten mechanischen<br />
Kontakt zu denselben [85]. Die Lageermittlung erfolgt durch den Einsatz von Win-<br />
kelmessgebern (Potentiometern), die die Verdrehung zweier benachbarter Arme zu-<br />
einander bestimmen. Die Veränderungen dieser Gelenke werden entsprechend regist-<br />
riert und im Computer in Raumkoordinaten umgerechnet. Der gelenkige Messarm<br />
trägt an seiner Spitze eine starre Sonde.<br />
Die Referenzierung des Patienten kann hier nur statisch über eine starre verwindungs-<br />
freie Verbindung zum Patienten realisiert werden. Die Handhabung der chirurgischen<br />
Instrumente durch einen Vielgelenkarm ist allerdings erheblich eingeschränkt, so dass<br />
diesen Navigationssystemen heute kaum noch praktische Bedeutung zukommt.<br />
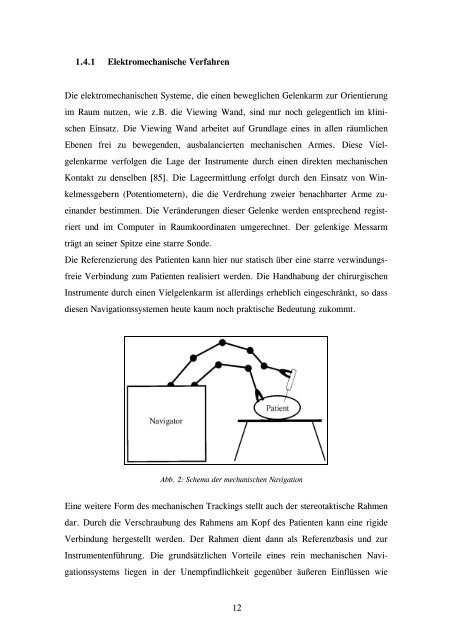
Abb. 2: Schema der mechanischen Navigation<br />
Eine weitere Form des mechanischen Trackings stellt auch der stereotaktische Rahmen<br />
dar. Durch die Verschraubung des Rahmens am Kopf des Patienten kann eine rigide<br />
Verbindung hergestellt werden. Der Rahmen dient dann als Referenzbasis und zur<br />
Instrumentenführung. Die grundsätzlichen Vorteile eines rein mechanischen Navi-<br />
gationssystems liegen in der Unempfindlichkeit gegenüber äußeren Einflüssen wie<br />
12