Humminbird - Fish Finders and GPS
Humminbird - Fish Finders and GPS
Humminbird - Fish Finders and GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
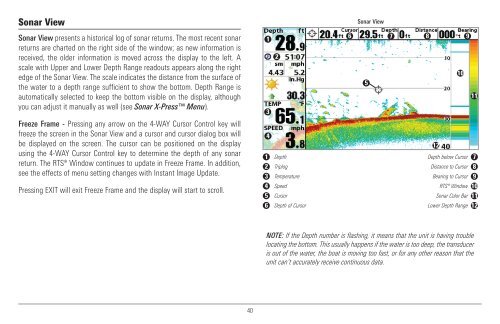
Sonar View<br />
Sonar View presents a historical log of sonar returns. The most recent sonar<br />
returns are charted on the right side of the window; as new information is<br />
received, the older information is moved across the display to the left. A<br />
scale with Upper <strong>and</strong> Lower Depth Range readouts appears along the right<br />
edge of the Sonar View. The scale indicates the distance from the surface of<br />
the water to a depth range sufficient to show the bottom. Depth Range is<br />
automatically selected to keep the bottom visible on the display, although<br />
you can adjust it manually as well (see Sonar X-Press Menu).<br />
Freeze Frame - Pressing any arrow on the 4-WAY Cursor Control key will<br />
freeze the screen in the Sonar View <strong>and</strong> a cursor <strong>and</strong> cursor dialog box will<br />
be displayed on the screen. The cursor can be positioned on the display<br />
using the 4-WAY Cursor Control key to determine the depth of any sonar<br />
return. The RTS® Window continues to update in Freeze Frame. In addition,<br />
see the effects of menu setting changes with Instant Image Update.<br />
Pressing EXIT will exit Freeze Frame <strong>and</strong> the display will start to scroll.<br />
Sonar View<br />
1<br />
6 7 8<br />
9<br />
2<br />
10<br />
5<br />
11<br />
3<br />
4<br />
12<br />
1 Depth<br />
Depth below Cursor 7<br />
2 Triplog<br />
Distance to Cursor 8<br />
3 Temperature<br />
Bearing to Cursor 9<br />
4 Speed<br />
RTS® Window 10<br />
5 Cursor<br />
Sonar Color Bar 11<br />
6 Depth of Cursor<br />
Lower Depth Range 12<br />
NOTE: If the Depth number is flashing, it means that the unit is having trouble<br />
locating the bottom. This usually happens if the water is too deep, the transducer<br />
is out of the water, the boat is moving too fast, or for any other reason that the<br />
unit can’t accurately receive continuous data.<br />
40