M-Maxâ„¢ Series Adjustable Frequency Drive - Eaton Corporation
M-Maxâ„¢ Series Adjustable Frequency Drive - Eaton Corporation
M-Maxâ„¢ Series Adjustable Frequency Drive - Eaton Corporation

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Parameters<br />
Activating/Deactivating PID Controller<br />
With a digital input (in FS DI6) configured as PID, PID control<br />
can be switched on and off through control signal terminals.<br />
When you activate the PID input, PID control is disabled. The<br />
frequency inverter then works with its standard frequency<br />
control again.<br />
This function is available only when PID control is active<br />
(P9.1 = 1).<br />
Do not switch the PID controller on and off while the<br />
frequency inverter is in RUN mode (RUN LED is lit).<br />
Parameterize one of the digital inputs 1 to 6 as a PID, by<br />
setting the parameter (P3.12 = 1–6) (factory setting<br />
(P3.12 = 6).<br />
The Activate/Disable PID Control function is optional. If you<br />
want PID control to be active all the time, you only need to<br />
set P9.1 = 1.<br />
PID-System Deviation (OD)<br />
The PID-system deviation (e) is the difference between<br />
reference and actual value (process variable PV).<br />
The digital output configured as OD is activated if a freely<br />
selectable control deviation (P9.17) is exceeded with the PID<br />
controller (P9.1 = 1) active. The OD output stays activated<br />
until this limit value is exceeded.<br />
If you wish to configure a parameterizable digital output or<br />
signalling relay as OD, you must set the limit value that<br />
activates the OD signal when exceeded at P9.17.<br />
Action: Then parameterize one of the digital inputs as OD<br />
output by setting the value 12 at P5.1 (2.3).<br />
96 M-Max <strong>Series</strong> <strong>Adjustable</strong> <strong>Frequency</strong> <strong>Drive</strong> MN04020003E—April 2011 www.eaton.com<br />
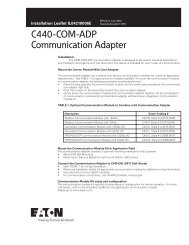
Function Chart for OD (PID System Deviation)<br />
P9.17<br />
P9.17<br />
OD<br />
Item<br />
Number Description<br />
1 Setpoint value<br />
2 Actual value<br />
1<br />
Feedback Value Check Signal (FBV)<br />
The FBV (Feedback Value Check) signal is issued when the<br />
actual (process) value (PV) drops below the lower limit value<br />
(P9.16) in RUN mode. It remains active until:<br />
● The actual value exceeds the upper limit value (P9.15)<br />
● The frequency inverter changes from RUN mode to STOP<br />
mode (deceleration with the set ramp time)<br />
2