

ÐÐ¾Ð»Ð½Ð°Ñ Ð²ÐµÑÑÐ¸Ñ - СамаÑÑкий гоÑÑдаÑÑÑвеннÑй аÑÑокоÑмиÑеÑкий ...
ÐÐ¾Ð»Ð½Ð°Ñ Ð²ÐµÑÑÐ¸Ñ - СамаÑÑкий гоÑÑдаÑÑÑвеннÑй аÑÑокоÑмиÑеÑкий ...
ÐÐ¾Ð»Ð½Ð°Ñ Ð²ÐµÑÑÐ¸Ñ - СамаÑÑкий гоÑÑдаÑÑÑвеннÑй аÑÑокоÑмиÑеÑкий ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Вестник Самарского государственного аэрокосмического университета, № 1, 2007<br />
ФД<br />
БП<br />
B i<br />
d<br />
dt<br />
B&<br />
i<br />
ω i<br />
БВ<br />
0, ±1 Динамика КА<br />
БУM<br />
I 1,2,3<br />
МИО i<br />
БФСУ<br />
МПЗ<br />
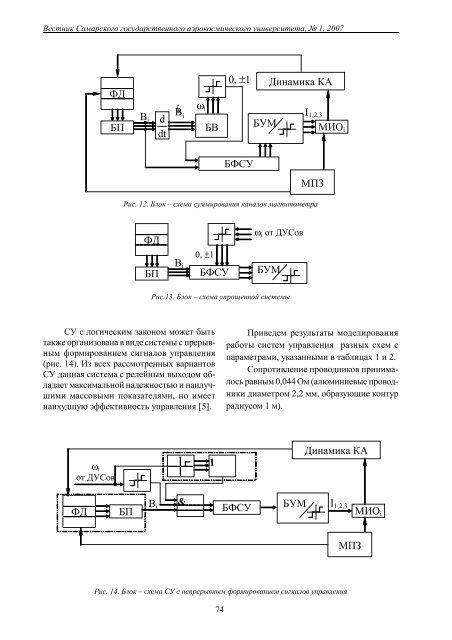
Рис. 12. Блок – схема суммирования каналов магнитометра<br />
ФД<br />
БП<br />
B i<br />
0, ±1<br />
БФСУ<br />
ω i от ДУСов<br />
БУM<br />
Рис.13. Блок – схема упрощенной системы<br />
СУ с логическим законом может быть<br />
также организована в виде системы с прерывным<br />
формированием сигналов управления<br />
(рис. 14). Из всех рассмотренных вариантов<br />
СУ данная система с релейным выходом обладает<br />
максимальной надежностью и наилучшими<br />
массовыми показателями, но имеет<br />
наихудшую эффективность управления [5].<br />
Приведем результаты моделирования<br />
работы систем управления разных схем с<br />
параметрами, указанными в таблицах 1 и 2.<br />
Сопротивление проводников принималось<br />
равным 0,044 Ом (алюминиевые проводники<br />
диаметром 2,2 мм, образующие контур<br />
радиусом 1 м).<br />
ω i<br />
от ДУСов<br />
1<br />
Динамика КА<br />
ФД<br />
БП<br />
B i<br />
&<br />
БФСУ<br />
БУM<br />
I 1,2,3<br />
МИО i<br />
МПЗ<br />
Рис. 14. Блок – схема СУ с непрерывным формированием сигналов управления<br />
74













