

EPOS2 Application Notes Collection - Maxon Motor
EPOS2 Application Notes Collection - Maxon Motor
EPOS2 Application Notes Collection - Maxon Motor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
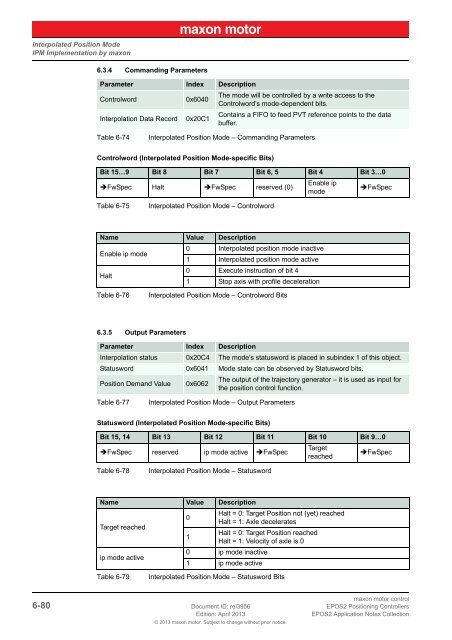
Interpolated Position Mode<br />
IPM Implementation by maxon<br />
6.3.4 Commanding Parameters<br />
Parameter Index Description<br />
Controlword<br />
Interpolation Data Record<br />
0x6040<br />
0x20C1<br />
The mode will be controlled by a write access to the<br />
Controlword’s mode-dependent bits.<br />
Contains a FIFO to feed PVT reference points to the data<br />
buffer.<br />
Table 6-74<br />
Interpolated Position Mode – Commanding Parameters<br />
Controlword (Interpolated Position Mode-specific Bits)<br />
Bit 15…9 Bit 8 Bit 7 Bit 6, 5 Bit 4 Bit 3…0<br />
FwSpec Halt FwSpec reserved (0)<br />
Enable ip<br />
mode<br />
FwSpec<br />
Table 6-75<br />
Interpolated Position Mode – Controlword<br />
Name Value Description<br />
0 Interpolated position mode inactive<br />
Enable ip mode<br />
1 Interpolated position mode active<br />
0 Execute instruction of bit 4<br />
Halt<br />
1 Stop axis with profile deceleration<br />
Table 6-76<br />
Interpolated Position Mode – Controlword Bits<br />
6.3.5 Output Parameters<br />
Parameter Index Description<br />
Interpolation status 0x20C4 The mode’s statusword is placed in subindex 1 of this object.<br />
Statusword 0x6041 Mode state can be observed by Statusword bits.<br />
Position Demand Value 0x6062<br />
The output of the trajectory generator – it is used as input for<br />
the position control function.<br />
Table 6-77<br />
Interpolated Position Mode – Output Parameters<br />
Statusword (Interpolated Position Mode-specific Bits)<br />
Bit 15, 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9…0<br />
FwSpec reserved ip mode active FwSpec<br />
Target<br />
reached<br />
FwSpec<br />
Table 6-78<br />
Interpolated Position Mode – Statusword<br />
Name Value Description<br />
Target reached<br />
ip mode active<br />
0<br />
1<br />
Halt = 0: Target Position not (yet) reached<br />
Halt = 1: Axle decelerates<br />
Halt = 0: Target Position reached<br />
Halt = 1: Velocity of axle is 0<br />
0 ip mode inactive<br />
1 ip mode active<br />
Table 6-79<br />
Interpolated Position Mode – Statusword Bits<br />
maxon motor control<br />
6-80 Document ID: rel3956 <strong>EPOS2</strong> Positioning Controllers<br />
Edition: April 2013<br />
<strong>EPOS2</strong> <strong>Application</strong> <strong>Notes</strong> <strong>Collection</strong><br />
© 2013 maxon motor. Subject to change without prior notice.













