

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Modellbildung der Regelstrecke 3-33<br />
3.3 Das Modell des Regelungssystems<br />
Anhand der bisher erarbeiteten Daten kann das Modell des gesamten Regelungssystems<br />
gebildet werden.<br />
x (t)<br />
w<br />
x(t)<br />
REGLER<br />
U(t) ω (t)<br />
- t / T<br />
K ( 1- e v )<br />
v<br />
2 2<br />
E E ⋅ R<br />
R 2<br />
x( t) = L − − sin( Φ( t))<br />
− sin ( Φ( t)) − Rcos( Φ(<br />
t))<br />
2⋅LL2⋅L Meßwerterfassung<br />
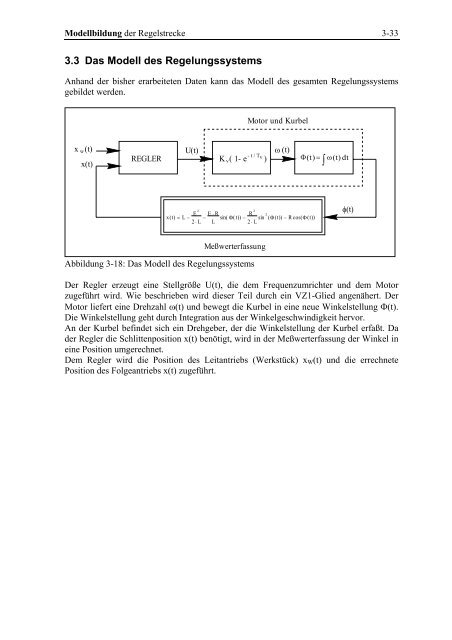
Abbildung 3-18: Das Modell des Regelungssystems<br />
Motor und Kurbel<br />
Φ( t) = ω()<br />
t dt ∫<br />
Der Regler erzeugt <strong>eine</strong> Stellgröße U(t), <strong>die</strong> dem Frequenzumrichter und dem Motor<br />
zugeführt wird. Wie beschrieben wird <strong>die</strong>ser Teil durch ein VZ1-Glied angenähert. Der<br />
Motor liefert <strong>eine</strong> Drehzahl ω(t) und bewegt <strong>die</strong> Kurbel in <strong>eine</strong> neue Winkelstellung Φ(t).<br />
Die Winkelstellung geht durch Integration aus der Winkelgeschwindigkeit hervor.<br />
An der Kurbel befindet sich ein Drehgeber, der <strong>die</strong> Winkelstellung der Kurbel erfaßt. Da<br />
der Regler <strong>die</strong> Schlittenposition x(t) benötigt, wird in der Meßwerterfassung der Winkel in<br />
<strong>eine</strong> Position umgerechnet.<br />
Dem Regler wird <strong>die</strong> Position des Leitantriebs (Werkstück) xW(t) und <strong>die</strong> errechnete<br />
Position des Folgeantriebs x(t) zugeführt.<br />
φ(t)




