

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-62<br />
4.8.3 Die Realisierung unter Simulink<br />
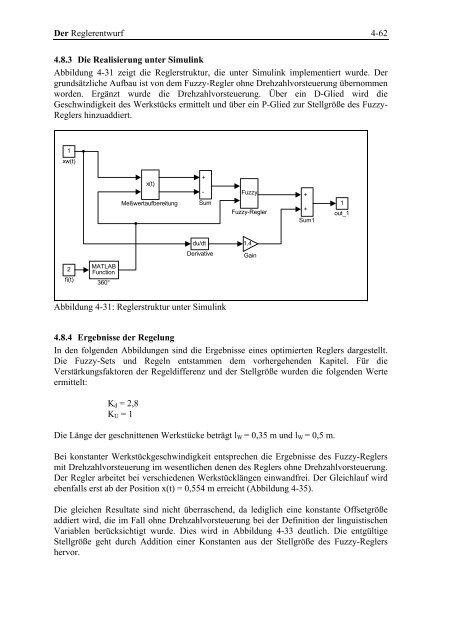
Abbildung 4-31 zeigt <strong>die</strong> Reglerstruktur, <strong>die</strong> unter Simulink implementiert wurde. Der<br />
grundsätzliche Aufbau ist von dem Fuzzy-Regler ohne Drehzahlvorsteuerung <strong>über</strong>nommen<br />
worden. Ergänzt wurde <strong>die</strong> Drehzahlvorsteuerung. Über ein D-Glied wird <strong>die</strong><br />
Geschwindigkeit des Werkstücks ermittelt und <strong>über</strong> ein P-Glied zur Stellgröße des Fuzzy-<br />
Reglers hinzuad<strong>die</strong>rt.<br />
1<br />
xw(t)<br />
2<br />
fi(t)<br />
MATLAB<br />
Function<br />
360°<br />
x(t)<br />
Meßwertaufbereitung<br />
+<br />
-<br />
Sum<br />
du/dt<br />
Derivative<br />
Abbildung 4-31: Reglerstruktur unter Simulink<br />
Fuzzy<br />
Fuzzy-Regler<br />
4.8.4 Ergebnisse der Regelung<br />
In den folgenden Abbildungen sind <strong>die</strong> Ergebnisse <strong>eine</strong>s optimierten Reglers dargestellt.<br />
Die Fuzzy-Sets und Regeln entstammen dem vorhergehenden Kapitel. Für <strong>die</strong><br />
Verstärkungsfaktoren der Regeldifferenz und der Stellgröße wurden <strong>die</strong> folgenden Werte<br />
ermittelt:<br />
Kd = 2,8<br />
KU = 1<br />
1.4<br />
Gain<br />
+<br />
+<br />
Sum1<br />
Die Länge der geschnittenen Werkstücke beträgt lW = 0,35 m und lW = 0,5 m.<br />
Bei konstanter Werkstückgeschwindigkeit entsprechen <strong>die</strong> Ergebnisse des Fuzzy-Reglers<br />
mit Drehzahlvorsteuerung im wesentlichen denen des Reglers ohne Drehzahlvorsteuerung.<br />
Der Regler arbeitet bei verschiedenen Werkstücklängen einwandfrei. Der Gleichlauf wird<br />
ebenfalls erst ab der Position x(t) = 0,554 m erreicht (Abbildung 4-35).<br />
Die gleichen Resultate sind nicht <strong>über</strong>raschend, da lediglich <strong>eine</strong> konstante Offsetgröße<br />
ad<strong>die</strong>rt wird, <strong>die</strong> im Fall ohne Drehzahlvorsteuerung bei der Definition der linguistischen<br />
Variablen berücksichtigt wurde. Dies wird in Abbildung 4-33 deutlich. Die entgültige<br />
Stellgröße geht durch Addition <strong>eine</strong>r Konstanten aus der Stellgröße des Fuzzy-Reglers<br />
hervor.<br />
1<br />
out_1




