

Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord
Reglerentwurf für eine „Fliegende Säge“, die über ... - Matthias Lenord

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Der <strong>Reglerentwurf</strong> 4-55<br />
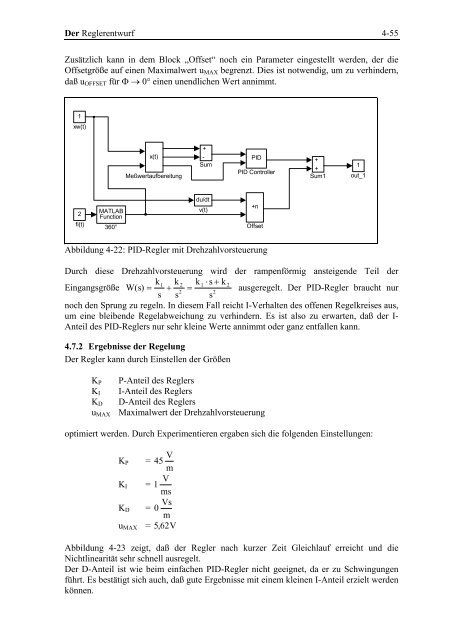
Zusätzlich kann in dem Block „Offset“ noch ein Parameter eingestellt werden, der <strong>die</strong><br />
Offsetgröße auf <strong>eine</strong>n Maximalwert uMAX begrenzt. Dies ist notwendig, um zu verhindern,<br />
daß uOFFSET <strong>für</strong> Φ → 0° <strong>eine</strong>n unendlichen Wert annimmt.<br />
1<br />
xw(t)<br />
2<br />
fi(t)<br />
MATLAB<br />
Function<br />
360°<br />
x(t)<br />
Meßwertaufbereitung<br />
+<br />
-<br />
Sum<br />
du/dt<br />
v(t)<br />
PID<br />
PID Controller<br />
+n<br />
Offset<br />
Abbildung 4-22: PID-Regler mit Drehzahlvorsteuerung<br />
+<br />
+<br />
Sum1<br />
1<br />
out_1<br />
Durch <strong>die</strong>se Drehzahlvorsteuerung wird der rampenförmig ansteigende Teil der<br />
k1<br />
k 2 k1⋅ s+ k2<br />
Eingangsgröße Ws ()= + =<br />
ausgeregelt. Der PID-Regler braucht nur<br />
2<br />
2<br />
s s s<br />
noch den Sprung zu regeln. In <strong>die</strong>sem Fall reicht I-Verhalten des offenen Regelkreises aus,<br />
um <strong>eine</strong> bleibende Regelabweichung zu verhindern. Es ist also zu erwarten, daß der I-<br />
Anteil des PID-Reglers nur sehr kl<strong>eine</strong> Werte annimmt oder ganz entfallen kann.<br />
4.7.2 Ergebnisse der Regelung<br />
Der Regler kann durch Einstellen der Größen<br />
P-Anteil des Reglers<br />
I-Anteil des Reglers<br />
D-Anteil des Reglers<br />
uMAX Maximalwert der Drehzahlvorsteuerung<br />
KP<br />
KI<br />
KD<br />
optimiert werden. Durch Experimentieren ergaben sich <strong>die</strong> folgenden Einstellungen:<br />
KP<br />
KI<br />
KD<br />
= 45 V<br />
m<br />
= 1 V<br />
ms<br />
= 0 Vs<br />
m<br />
uMAX = 562 , V<br />
Abbildung 4-23 zeigt, daß der Regler nach kurzer Zeit Gleichlauf erreicht und <strong>die</strong><br />
Nichtlinearität sehr schnell ausregelt.<br />
Der D-Anteil ist wie beim einfachen PID-Regler nicht geeignet, da er zu Schwingungen<br />
führt. Es bestätigt sich auch, daß gute Ergebnisse mit <strong>eine</strong>m kl<strong>eine</strong>n I-Anteil erzielt werden<br />
können.




